




Apollo自动驾驶:路径-速度规划详解
本篇文档是关于Apollo自动驾驶入门课程的第⑧讲,专门探讨了规划模块的深入内容,特别是路径-速度解耦规划。路径-速度解耦是一种关键的决策策略,它将车辆的轨迹规划分解为两个独立但相互关联的部分:路径规划和速度规划。
首先,路径规划通过将道路划分为单元格,并在每个单元格中随机采样点,生成候选路径。这些路径会根据预设的成本函数进行评估,这个函数考量的因素包括路径的平滑性、安全性、与车道中心的偏差,以及开发者的其他特定需求。通过比较各个路径的成本,成本最低的路径会被优选。
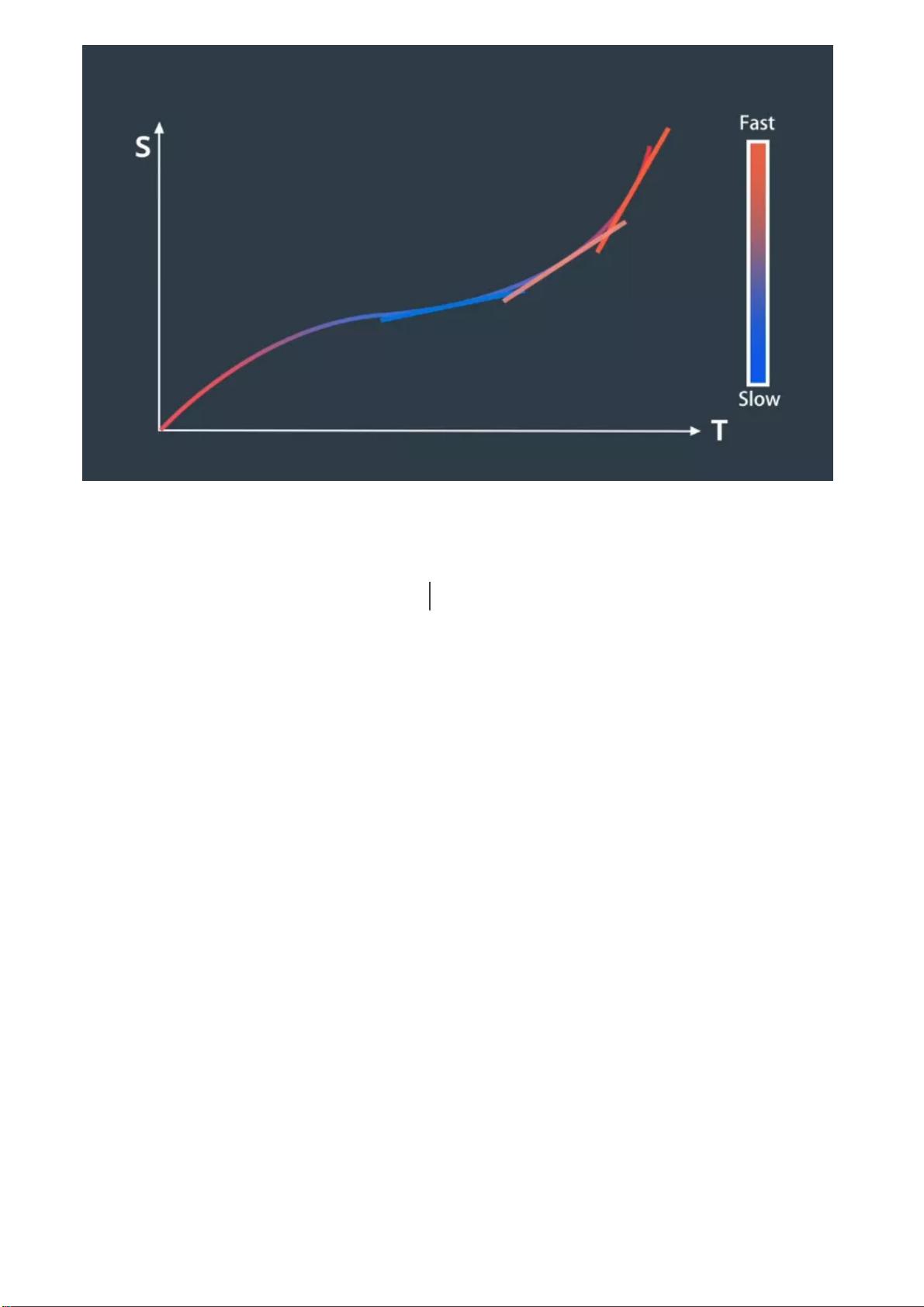
接着,速度规划关注如何确定沿选定路径的速度分布,即速度曲线。它不是单一速度的选择,而是连续的点速度序列,考虑到路径约束和可能存在的障碍物。ST图作为一种工具,用于可视化车辆的运动状态,其中"S"代表纵向位移,"T"代表时间。曲线的斜率表示速度,斜率陡峭表示速度较快。
速度规划过程中,ST图被离散化为一系列单元格,每个单元格内的速度保持恒定,这样便于构建和控制速度曲线。遇到障碍物时,如预测的驶入路段,会在ST图上标记为阻止区域,确保速度曲线避开这些区域以避免碰撞。
整个规划过程依赖于优化算法,它们通过复杂的数学计算寻找满足所有约束条件的最佳速度曲线。这种解耦方法允许自动驾驶系统更加灵活地适应驾驶环境,同时保证了安全性和效率。
总结来说,Apollo自动驾驶的规划模块是实现自主导航的关键组成部分,通过路径-速度解耦、成本函数评估、ST图和优化算法,它能智能地规划车辆的行驶轨迹,确保在复杂交通环境中平稳、安全地行驶。理解并掌握这些原理和技术对于理解和应用自动驾驶技术至关重要。
4
速度规划
为构建最佳速度曲线 需要将 ST 图离散为 多个单元格。单元格之间的速 度有所变化,但在每个 单
元格内速度保持不变 ,该方 法可简化速度曲线的构 建并维 持曲线的近似度。在 ST 图中可以将 障
碍物绘 制 为 在 特 定 时 间段内阻 挡 道 路 的 某 些部分的 矩 形 。 例 如 ,假设预 测 模 块 预 测 车 辆将在 t0
到 t1 的时间段内驶入的车道。由于该车将在此期间占据位置 s0 到 s1,因此在 ST 图上绘制了
一个矩形,它将在时间段 t0 到 t1 期 间阻挡 位置 s0 到 s1。为避免碰撞,速度曲线不得 与此矩
形相交。既然有了一 张各种 单元格被阻挡的 ST 图,便可以使用优化引 擎为该图选择最佳的速 度
曲 线 。 优 化 算 法 通 过 复 杂 的 数 学 运 算 来 搜 索 受 到 各 种 限 制 的 低 成 本 解 决 方 案 。 这 些 限 制 可 能 包
括:法律限制,如速度限制;距离限制,如与障碍物的距离;汽车的物理限制,如加速度限制。
下载后可阅读完整内容,剩余10页未读,立即下载
738 浏览量
221 浏览量
285 浏览量
337 浏览量
189 浏览量
156 浏览量

疯狂的机器人
- 粉丝: 9399
 我的内容管理
展开
我的内容管理
展开








最新资源
- 实现ViewPager+Fragment仿微信底部TAG渐变效果
- C语言在Windows下的日期时间操作类实现
- VC语言获取系统进程列表的实现方法
- Android开发指南:eoe特刊23期详解
- 打造仿QQ聊天界面:带横向滑动删除的表情功能
- 在线编辑JSON格式的利器:JSONedit使用体验
- 深入浅出面向对象程序设计的C#实战指南
- SQL SERVER基础操作:增删改查及视图和存储过程
- 探索74LS74系列:数字逻辑集成器件核心解析
- 批量图片下载器PictureDown的C#源码解析与实现
- 网上订餐系统源码与论文资源 - JSP/Struts/Hibernate
- 实现QQ风格下拉菜单的MFC ComBox控件
- CHAN - 深度解析JavaScript项目
- Java实现带进度条文件上传功能详解
- 开源网店系统NopCommerce 2008版本发布
- 图标合集压缩包 - icon图标资源大全






















