揭秘无人驾驶算法:传感、感知与决策的关键
37 浏览量
更新于2024-08-28
1
收藏 234KB PDF 举报
无人驾驶技术是一种复杂的集成系统,其核心在于精确的算法设计和多种传感器的有效协同工作。算法系统主要分为三个关键部分:传感、感知和决策。
1. 传感:这是无人驾驶的基础,通过多种传感器收集环境信息。主要包括:
- GPS/IMU组合:全球定位系统(GPS)提供大范围的地理位置信息,更新频率较低(10Hz),而惯性测量单元(IMU)则提供高速实时的运动状态数据(200Hz),两者结合弥补了各自的不足,确保车辆定位的准确性。
- 激光雷达(LIDAR):这是一种高精度的三维扫描设备,能构建高清晰地图,用于定位和避障。Velodyne 64-束激光雷达可以达到10Hz的扫描速率,提供实时的物体检测信息。
- 摄像头:广泛应用于物体识别、行人检测和车道线识别等,提供丰富的视觉信息,通常每个方向安装多部摄像头,如特斯拉的前视、侧视和环视摄像头,形成立体感知。
- 雷达和声呐:利用电磁波或声波探测障碍物,提供距离、速度和方向等信息,作为避障的重要辅助手段。
2. 感知:基于传感器收集的数据,无人驾驶系统需要解析并理解周围环境。这包括道路标志识别、障碍物检测、行人动态跟踪等,摄像头和雷达数据在这一环节起着至关重要的作用。
3. 决策:在获取到足够的环境信息后,无人驾驶算法进行路径规划和行为决策。这涉及到复杂的机器学习模型,如深度强化学习,根据实时的感知结果,计算出最优行驶路线,同时考虑到安全性和效率,做出是否加速、减速、转向等操作指令。
无人驾驶的算法设计不仅要考虑传感器数据的质量和融合,还要考虑到算法的实时性、鲁棒性和安全性。随着AI技术的发展,自动驾驶系统的性能不断提升,但仍然面临着法律、伦理、隐私和网络安全等方面的挑战。未来,无人驾驶的进一步发展将依赖于算法优化、新型传感器的发明以及对复杂环境的理解能力的增强。
你听过无人驾驶,但你了解无人驾驶的算法吗?你听过无人驾驶,但你了解无人驾驶的算法吗?
算法系统由几部分组成:第一,传感,并从传感器原始数据中提取有意义信息;第二,感知,以定位无人车所在位置及感知现
在所处的环境;第三,决策,以便可靠、安全地抵达目的地。
1.传感
通常来说,一辆无人车装备有许多不同类型的主传感器。每一种类型的传感器各自有不同的优劣,因此,来自不同传感器的传
感数据应该有效地进行融合。现在无人驾驶中普遍使用的传感器包括以下几种。
(1)GPS/IMU:GPS/IMU 传感系统通过高达200 Hz频率的全球定位和惯性更新数据,以帮助无人车完成自我定位。GPS是
一个相对准确的定位用传感器,但是它的更新频率过低,仅有10Hz,不足以提供足够实时的位置更新。IMU的准确度随着时
间降低,因此在长时间距离内并不能保证位置更新的准确性;但是,它有着GPS所欠缺的实时性,IMU的更新频率可以达到
200Hz或者更高。通过整合GPS与IMU,我们可以为车辆定位提供既准确又足够实时的位置更新。
(2)LIDAR:激光雷达可被用来绘制地图、定位及避障。雷达的准确率非常高,因此在无人车设计中雷达通常被作为主传感
器使用。激光雷达是以激光为光源,通过探测激光与被探测物相互作用的光波信号来完成遥感测量。激光雷达可以用来产生高
精度地图,并针对高精地图完成移动车辆的定位,以及满足避障的要求。以Velodyne 64-束激光雷达为例,它可以完成10Hz
旋转并且每秒可达到130万次读数。
(3)摄像头:摄像头被广泛使用在物体识别及物体追踪等场景中,在车道线检测、交通灯侦测、人行道检测中都以摄像头为
主要解决方案。为了加强安全性,现有的无人车实现通常在车身周围使用至少八个摄像头,分别从前、后、左、右四个维度完
成物体发现、识别、追踪等任务。这些摄像头通常以60Hz的频率工作,当多个摄像头同时工作时,将产生高达1.8GB每秒的
巨额数据量。
(4)雷达和声呐:雷达把电磁波的能量发射至空间中某一方向,处在此方向上的物体反射该电磁波,雷达通过接收此反射
波,以提取该物体的某些有关信息,包括目标物体至雷达的距离、距离变化率或径向速度、方位、高度等。雷达和声呐系统是
避障的最后一道保障。雷达和声呐产生的数据用来表示在车的前进方向上最近障碍物的距离。一旦系统检测到前方不远有障碍
物出现,则有极大的相撞危险,无人车会启动紧急刹车以完成避障。因此,雷达和声呐系统产生的数据不需要过多的处理,通
常可直接被控制处理器采用,并不需要主计算流水线的介入,因此可实现转向、刹车或预张紧安全带等紧急功能。
2.感知
在获得传感信息之后,数据将被推送至感知子系统以充分了解无人车所处的周遭环境。在这里感知子系统主要做的是三件事:
定位、物体识别与追踪。
1)定位
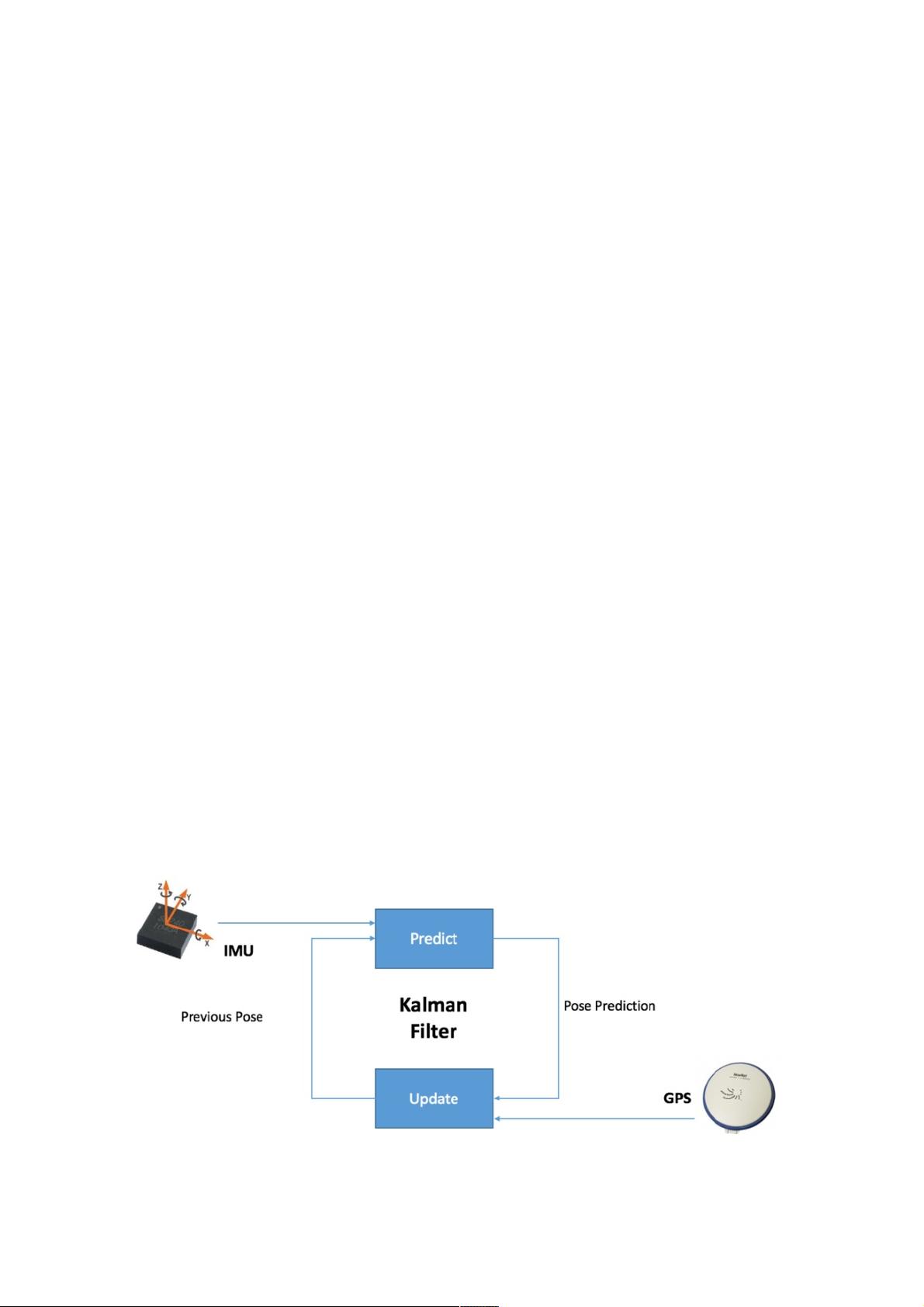
GPS以较低的更新频率提供相对准确的位置信息,IMU则以较高的更新频率提供准确性偏低的位置信息。我们可以使用卡尔曼
滤波整合两类数据各自的优势,合并提供准确且实时的位置信息更新。如下图所示,IMU每5ms更新一次,但是期间误差不断
累积精度不断降低。所幸的是,每100ms,我们可以得到一次GPS数据更新,以帮助我们校正IMU积累的误差。因此,我们最
终可以获得实时并准确的位置信息。然而,我们不能仅仅依靠这样的数据组合完成定位工作。原因有三:其一,这样的定位精
度仅在一米之内;其二,GPS信号有着天然的多路径问题将引入噪声干扰;其三,GPS必须在非封闭的环境下工作,因此在
诸如隧道等场景中GPS都不适用。
基于GPS/IMU定位的原理图
因此作为补充方案,摄像头也被用于定位。
下载后可阅读完整内容,剩余3页未读,立即下载
2018-07-05 上传
2021-09-10 上传
2024-04-12 上传
107 浏览量
2021-09-21 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38522323
- 粉丝: 5
- 资源: 908
 我的内容管理
展开
我的内容管理
展开







