TMC4210:低成本高性能运动控制芯片,集成SPI接口与步进电机驱动
需积分: 41 82 浏览量
更新于2024-07-18
收藏 1.19MB PDF 举报
"本文将介绍一款来自德国TRINAMIC公司的TMC4210运动控制芯片,这是一款专为步进电机设计的低成本、高性能控制器,支持SPI通信接口和STEP/DIR输出,适用于TMC26x和TMC389步进驱动器。"
TMC4210是TRINAMICMotionControl GmbH & Co. KG开发的一款单轴步进电机控制器,它在设计上注重低功耗和高效性能,特别适合对成本敏感但又需要精确运动控制的项目。这款芯片采用SPI(串行外围设备接口)与微控制器通信,该接口简单易用,最高时钟频率可达32MHz,允许快速数据传输。同时,TMC4210还提供STEP/DIR信号输出,直接连接到步进电机驱动器,简化了系统架构。
芯片的主要特性包括:
1. **1轴步进电机控制器**:TMC4210专为控制一个步进电机而设计,能够实现精确的电机定位和速度控制。
2. **3.3V或5V操作**:IOs兼容CMOS/TTL电平,适应不同电源环境。
3. **SPI 4线接口**:与微控制器的串行通信,便于系统集成。
4. **STEP/DIR接口**:直接与步进电机驱动器交互,提供脉冲和方向信号。
5. **高时钟频率**:最高支持32MHz,可以使用CPU时钟,提高系统的响应速度。
6. **24位内部位置计数器**:能存储大量位置信息,确保精确的电机位置跟踪。
7. **高达1MHz的微步频率**:支持高速运行,提升电机运行的平滑度和精度。
8. **参数读取功能**:可以读取所有运动参数,方便调试和监控。
9. **斜坡生成器**:用于自主定位和速度控制,实现平滑的加速和减速。
10. **动态参数调整**:允许在运行过程中改变目标运动参数。
11. **低功耗**:在4MHz工作时,典型电流仅为1.25mA,节省能源。
12. **紧凑尺寸**:采用16引脚SSOP封装,节省PCB空间。
TMC4210的这些特性使得它成为步进电机应用的理想选择,尤其适用于自动化设备、精密定位系统和各种需要精确运动控制的场合。通过SPI接口,用户可以轻松地从微控制器向TMC4210发送指令,调整电机的工作模式,实现定制化的运动控制策略。同时,其内置的 Ramp Generator 和 Position Comparator 功能,使TMC4210具备自主控制能力,能够在不需要外部控制信号的情况下完成预定的运动任务。TMC4210以其低成本和高性能,为步进电机控制系统提供了高效且经济的解决方案。
TMC4210 DATASHEET (Rev. 1.04 / 2017-AUG-30) 9
www.trinamic.com
3 Package
The TMC4210 is qualified for the industrial temperature range. The package is RoHS compilant.
Order code
Package
Characteristics
JEDEC Drawing
TMC4210-I
SSOP16
150 mils, 16 pins, plastic package, industrial (-40… +85°C)
MO-137 (150 mils)
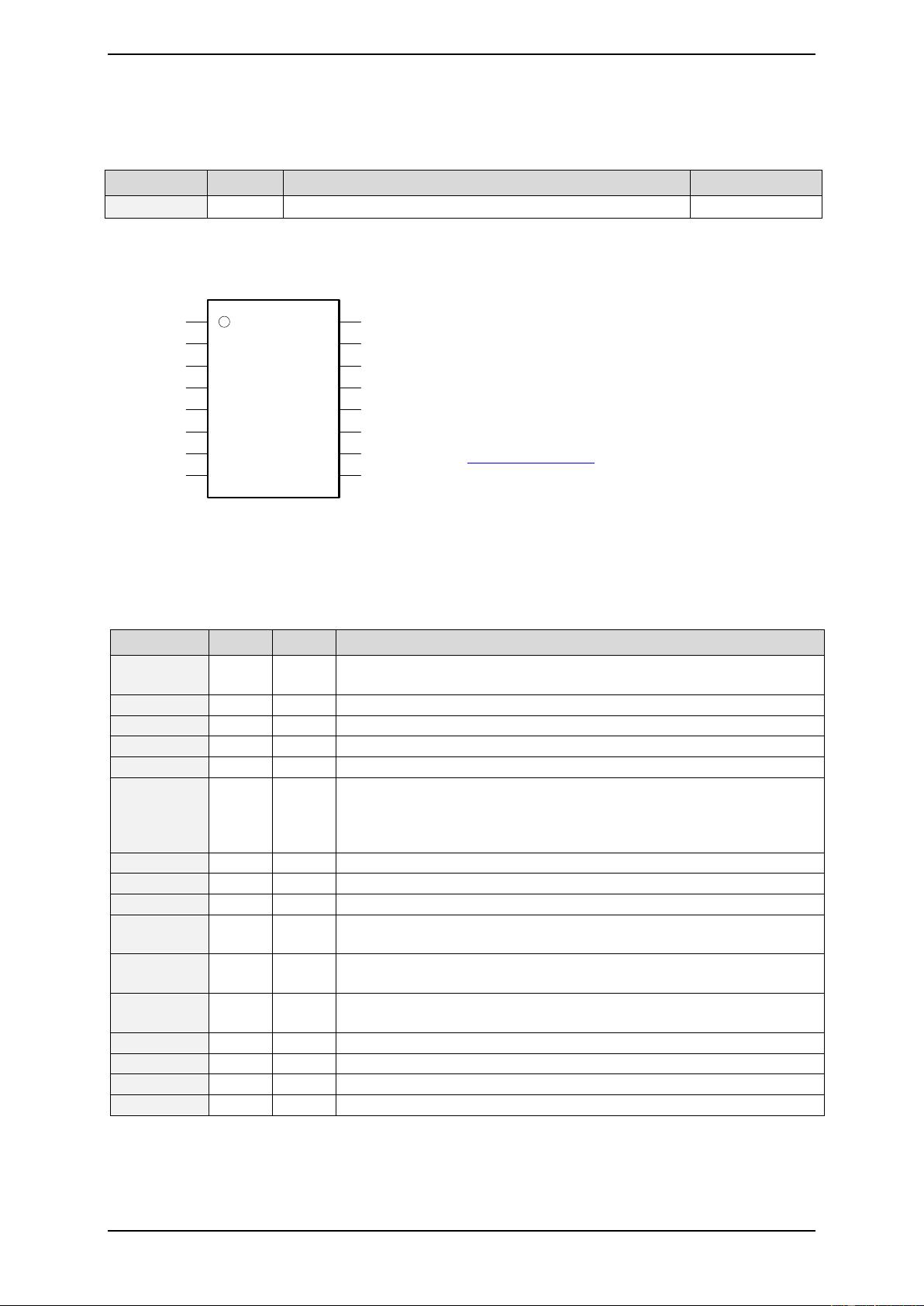
3.1 Package Outline
TMC4210-I
V33
nSCS_C
GND
SDI_C
TEST V5
SCK_C
n.c.
nINT_SDO_C
CLK n.c.
GP_IN
REF_L
REF_R
DIR_OUT
STEP_OUT
1
2
3
4
5
6
7
8
16
10
11
12
13
14
15
9
SSOP16 (150 MILS)
Figure 3.1 TMC4210 pin out
3.2 Signal Descriptions
Pin
SSOP16
In/Out
Description
Reset
-
-
Internal power-on reset.
No external reset input pin is available.
CLK
5
I
Clock input
nSCS_C
6
I
Low active SPI chip select input driven from µC
SCK_C
7
I
Serial data clock input driven from µC
SDI_C
8
I
Serial data input driven from µC
nINT_SDO_C
9
O
Serial data output to µC input /
Multiplexed nINTERRUPT output if communication with µC is idle (resp.
nSCS_C = 1)
SDO_C will never be high impedance
n.c.
12, 16
-
Leave open
SCK_S
11
O
DIR output
SDO_S
10
O
STEP output
REF_L
1
I
Left reference/limit switch input. Pull to GND if not used.
(no internal pull-up resistor)
GP_IN
2
I
General purpose input. Pull to GND if not used.
(no internal pull-up resistor)
REF_R
3
I
Right reference/limit switch input. Pull to GND if not used.
(no internal pull-up resistor)
V5
13
+5V supply / +3.3V supply
V33
14
470nF ceramic capacitor pin / +3.3V supply
GND
15
Ground
TEST
4
I
Must be connected to GND as close as possible to the chip. No user function.
Please refer to the application note
PCB_Guidelines_TRINAMIC_packages
for a practical guideline for all available TRINAMIC
IC packages and PCB footprints. The application
note covers package dimensions, example
footprints and general information on PCB
footprints for these packages. It is available on
www.trinamic.com.
剩余47页未读,继续阅读
2016-03-07 上传
2020-08-18 上传
2019-12-27 上传
2020-10-20 上传
点击了解资源详情
点击了解资源详情
2021-12-09 上传
2021-03-17 上传
2020-08-11 上传

qq_42722985
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







