基于MPC的风能转换系统功率跟踪控制
54 浏览量
更新于2024-08-27
1
收藏 531KB PDF 举报
"这篇研究论文探讨了基于模型预测控制(MPC)的永磁同步发电机(PMSG)风能转换系统功率追踪控制方法。通过利用MPC方法来应对风能转换系统的非线性、不确定性及随机性等内在特性,设计了一种简化的二阶线性模型,以提高MPC算法的可行性。此外,采用连续/广义最小残差法(C/GMRES)作为快速计算手段,获取控制序列。模拟结果证明了所设计的模型预测控制器在系统功率追踪能力上的有效性,无论是在变化的负荷需求还是参数扰动情况下。关键词包括:风能转换系统、模型预测控制、GMRES和功率追踪控制。"
详细内容:
这篇研究论文聚焦于利用模型预测控制技术来优化永磁同步发电机(PMSG)驱动的风能转换系统(WECS)的功率追踪性能。MPC是一种先进的控制策略,它考虑了系统的未来行为,通过优化一个预测模型来制定当前的控制决策,从而有效处理复杂的动态系统,如风能转换系统中的非线性和不确定性。
首先,论文提出了一种简化的二阶线性模型,这是通过预反馈和前向差分技术实现的。这种简化模型有助于降低MPC算法的计算复杂性,同时保持对系统行为的准确描述,以确保控制性能。预反馈技术是通过在系统输入中引入一个反馈项来改善系统的动态响应,而前向差分则用于近似系统的微分项。
其次,论文引入了连续/广义最小残差法(C/GMRES),这是一种高效的数值求解方法,用于快速计算出满足系统约束的最优控制序列。GMRES方法是求解线性系统的一种迭代算法,特别适用于大型稀疏矩阵问题,而连续版本则将其应用于连续时间系统,使得控制决策能够在实时环境中迅速执行。
通过仿真分析,论文验证了所提出的MPC策略在各种工况下的性能。无论是在负荷需求变化还是系统参数受到扰动的情况下,MPC都能有效地追踪目标功率,展示出良好的动态响应和稳定性。这表明MPC策略能够适应风能转换系统中常见的不确定性和随机性,例如风速波动。
这项研究为风能转换系统的功率控制提供了新的视角,通过结合MPC和高效计算方法,提高了系统的功率追踪能力和对环境变化的适应性。这将有利于提升风力发电的效率和稳定性,进一步推动可再生能源的广泛应用。
MPC-Based Power Tracking Control for a Wind Energy Conversion
System with PM Synchronous Generator
JIANG Haiping, JIAO Xiaohong, REN Lina
Institute of Electrical Engineering, Yanshan University, Qinhuangdao 066004, China
E-mail: jiaoxh@ysu.edu.cn
Abstract: In consideration of the intrinsic
properties such as nonlinearity, uncertainties and randomness of the Wind Energy
Conversion System (WECS) based on Permanent Magnet Synchronous Generator (PMSG), the Model Predictive Control (MPC)
method is utilized to realize the power tracking control of the system. A simplified second-order linear model by the pre-feedback
and the forward difference are adopted to improve the feasibility of the MPC algorithm. In addition, a fast computing method,
the Continuation/GMRES (C/GMRES) method, is employed to obtain the control sequence. Simulation results verify the
effectiveness of the designed model predictive controller, in term of the power tracking ability of the system under the varying
load demand and parameters perturbation.
Key Words: Wind energy conversion system, model predictive control, GMRES, power tracking control
1 Introduction
Electric power generation using the clean, infinite and
available wind resource is of important significance to
energy conservation and environmental protection, as well as
PMSG has obvious advantages in high efficiency, high
reliability, low weight, etc, which make the PMSG-based
WECS is receiving considerable attention throughout the
world
[1,2]
.
The WECS is a kind of system which is difficult to control,
because the power from wind depends on the random wind
speed which could result in complexity to the WECS, and the
nonlinear aerodynamic performance of Wind Turbine (WT)
maybe lead to the WECS uncertainties. To deal with this
situation some advanced methods have been utilized, such as
adaptive control
[3]
, robust control
[4]
, etc. However each
method has its own disadvantages. Specially, the adaptive
control relies heavily on the system structure, and the
uncertain parameters must be unknown constant or slow
time-varying; the robust control is not so strict about the
system structure, but the boundary of the uncertain
parameters should be known.
MPC is a kind of model-based optimal control which has
already been used in the PMSG control system
[5,6]
. This
optimal approach computes the next control action by
minimizing the cost function according to the predicted
behavior of system. Hence, to some extent, the effect of the
nonlinearity, uncertainties and randomness in the WECS can
expect to be reduced
[7]
. In general, constraints are necessary
to guarantee the PMSG performance, but the concomitant
computational burden is inevitable. Therefore, most of the
research on PMSG with the MPC focuses on the simplified
model. When solving the problem, we usually generalize it
into a quadratic programming problem and complete it with
iterative approaches, whereas there is little concern about the
computational speed of iterative approaches
[8,9]
.
*
This work is supported by Ph.D. Programs Foundation of Ministry of
Education of China under Grant 20111333110001, National Natural
Science Foundation (NNSF) of China under Grant 61304025, and Natural
Science Foundation of Hebei Province under Grant F2014203234.
In this paper, considering the maximum output power of
the WECS is enough to meet the load demand, we adopt a
MPC method with low computational cost to achieve the
power tracking control of the system within a narrow range
of the wind speed. More specially, a second-order linearized
model of PMSG and the forward difference are utilized to
reduce the computational cost, and the Generalized
Minimum Residual (GMRES) method is used to realize the
fast computation
[10]
. The effectiveness of the model
predictive controller is verified under MATLAB/Simulink.
2 PMSG-based Wind Generation Control System
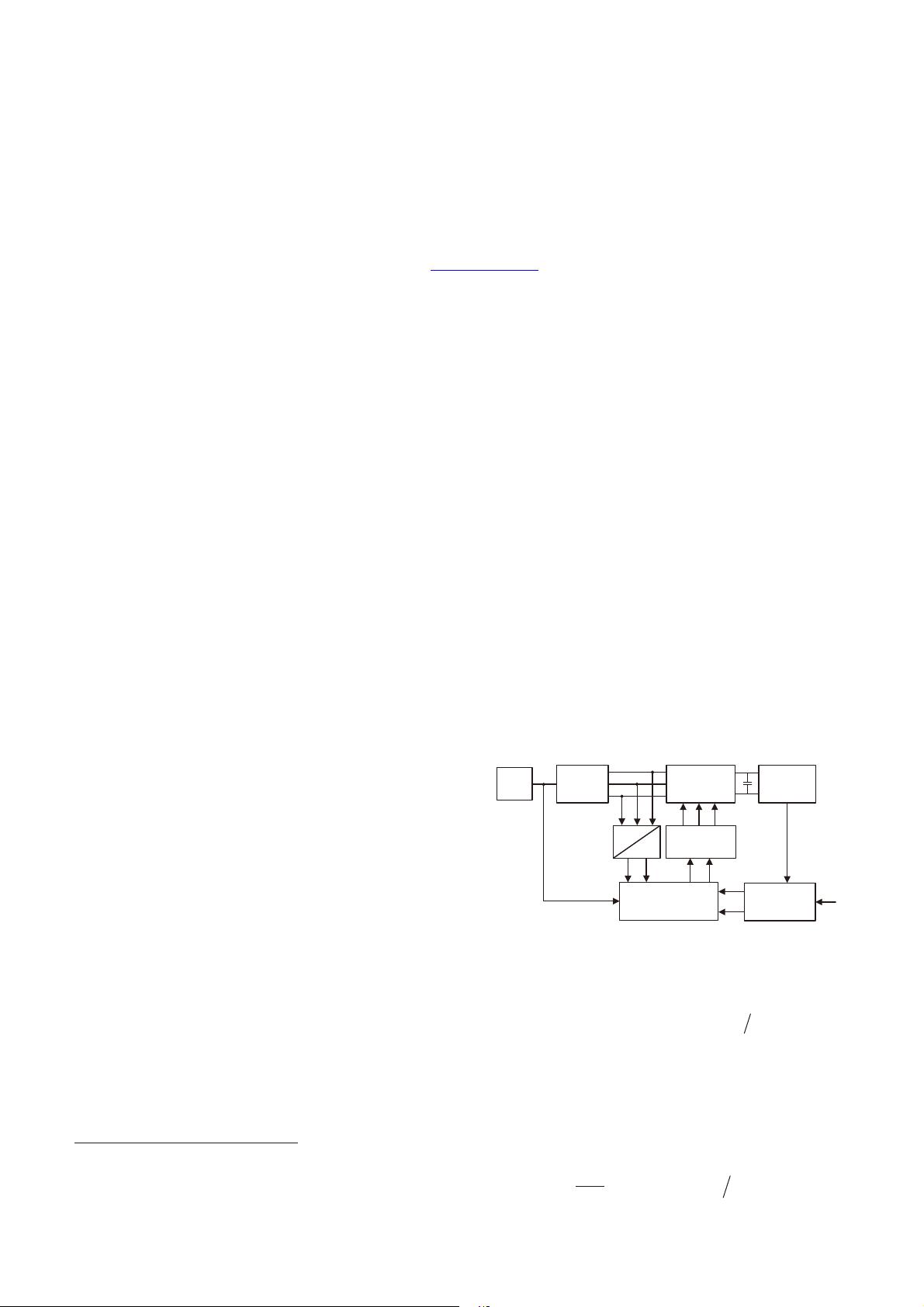
The block diagram of the considered PMSG-based wind
generation control system is shown in Fig. 1. The system
consists of WT, PMSG, a converter, an inverter, a load and a
controller.
*
d
i
*
q
i
w
V
PMSG
Converter
w
Z
d
i
q
i
d
u
q
u
a
i
b
i
c
i
WT
PWM
Generator
Controller
l
P
Inverter
&Load
abc
dq
Expect
Calculator
Fig. 1: The block diagram of the PMSG-based WECS
The energy captured by the WT depends on the wind
speed, the blade pitch and the rotor speed. The aerodynamic
torque of the WT can be described as:
23
0.5 , ,
wwpwww
TRVCV
US Z T Z
(1)
where
U
is the air density,
R
is the blade radius,
w
V
is the
wind speed,
p
C
is the power coefficient which is a function
of the rotor speed of the WT
w
Z
and the pitch angle
T
.
The WT coaxially connects to and directly drives the
PMSG in the considered WECS. The equation of the drive
train can be described by:
g
we mg eq
d
TTB J
dt
Z
Z
(2)
Proceedings of the 34th Chinese Control Conference
Jul
y
28-30, 2015, Han
g
zhou, China
4079
下载后可阅读完整内容,剩余4页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-02-10 上传
2013-01-14 上传
2021-02-11 上传
2021-02-10 上传
2021-02-08 上传
2021-02-08 上传

weixin_38724363
- 粉丝: 5
- 资源: 972
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
