第05章:线性系统在数字信号处理中的基石
需积分: 0 90 浏览量
更新于2024-08-02
收藏 202KB PDF 举报
在"The Scientist and Engineer's Guide to Digital Signal Processing"第五章中,讨论了线性系统在数字信号处理(DSP)中的核心地位。这一章节是理解 DSP 技术的基础,因为大多数 DSP 方法都依赖于称为“叠加”的分而治之策略。叠加原理允许复杂信号被分解成简单的组成部分,每个部分独立处理后再合并结果,这样就把一个难题转化为多个易于管理的小问题。
线性系统是指遵循特定数学规则的系统,它们的行为满足加法和比例法则,即输入信号的线性组合会产生与之对应的输出的线性组合。在工程和科学研究中,许多实际应用都符合线性系统的特性,因此线性系统理论在信号处理领域具有广泛的应用价值。
信号和系统是紧密相关的概念。信号可以看作是一个参数随另一个参数变化的描述,如电子电路中电压随时间的变化,或者图像中亮度随距离的变化。系统则是对输入信号进行处理并产生相应输出的设备或过程。例如,图5-1中的块图展示了输入信号(比如声音或图像)如何通过系统转化为输出信号(比如音频播放或图像处理后的输出图像)。
在本章中,首先定义了什么是线性系统,包括其基本性质。接着,探讨了如何利用线性系统的特性来分析和设计信号处理器。一种常用的方法是将复杂的连续信号分解为简单的波形,如正弦或余弦函数,通过傅里叶变换等技术实现频域处理。通过这样的分解,可以有效地滤波、放大、延迟或压缩信号,这些都是 DSP 中广泛应用的信号处理技术。
此外,线性系统还涉及系统函数和系统矩阵的概念,它们是描述系统行为的重要工具。系统函数表示输入信号到输出信号的映射关系,而系统矩阵则用于表示线性系统在复数域中的行为。通过研究这些概念,工程师能够更好地理解线性系统如何处理不同类型的输入,并设计出适应特定需求的信号处理算法。
第五章深入浅出地介绍了线性系统在 DSP 中的重要性,不仅涵盖了线性系统的基本概念,还涵盖了信号分解、叠加原理以及各种信号处理技术的应用。理解这一章的内容对于任何从事 DSP 工程的人员来说都是至关重要的,因为它为后续的滤波器设计、调制解调、频谱分析等高级 DSP 技术打下了坚实的基础。
The Scientist and Engineer's Guide to Digital Signal Processing90
System
System
IF
THEN
System
AND IF
x
1
[n]
y
1
[n]
x
2
[n] y
2
[n]
y
1
[n]+y
2
[n]
x
1
[n]+x
2
[n]
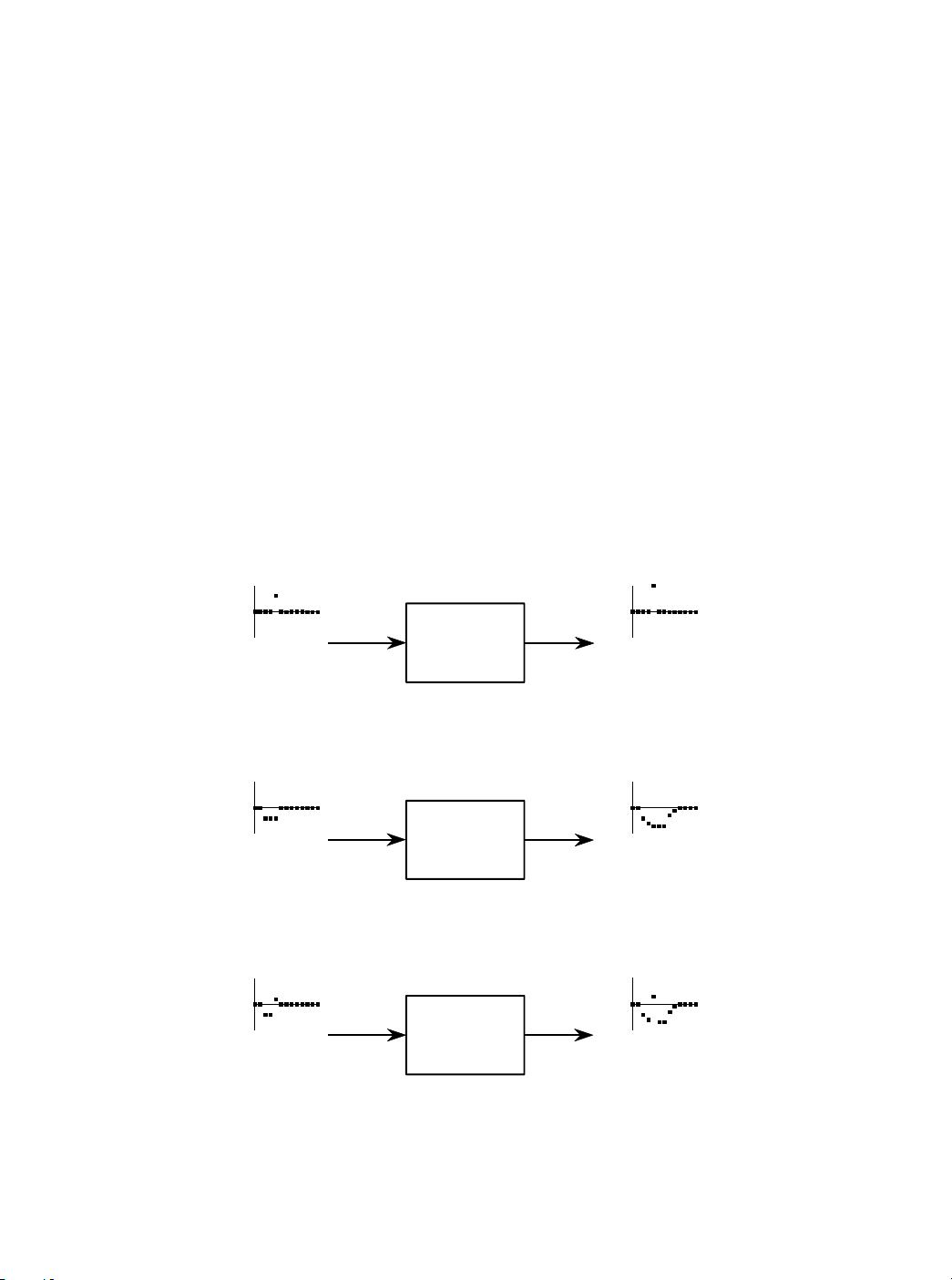
FIGURE 5-3
Definition of additivity. A system is said to be additive if added signals pass through it
without interacting. Formally, if x
1
[n] results in y
1
[n], and if x
2
[n] results in y
2
[n], then
x
1
[n]+x
2
[n] results in y
1
[n]+y
2
[n].
A simple resistor provides a good example of both homogenous and non-
homogeneous systems. If the input to the system is the voltage across the
resistor, , and the output from the system is the current through the resistor,v(t)
, the system is homogeneous. Ohm's law guarantees this; if the voltage isi(t)
increased or decreased, there will be a corresponding increase or decrease in
the current. Now, consider another system where the input signal is the voltage
across the resistor, , but the output signal is the power being dissipated inv(t)
the resistor, . Since power is proportional to the square of the voltage, ifp(t)
the input signal is increased by a factor of two, the output signal is increase by
a factor of four. This system is not homogeneous and therefore cannot be
linear.
The property of additivity is illustrated in Fig. 5-3. Consider a system where
an input of produces an output of . Further suppose that a differentx
1
[n] y
1
[n]
input, , produces another output, . The system is said to be additive,x
2
[n] y
2
[n]
if an input of results in an output of , for all possiblex
1
[n] % x
2
[n] y
1
[n] % y
2
[n]
input signals. In words, signals added at the input produce signals that are
added at the output.
剩余19页未读,继续阅读
2010-12-29 上传
2009-10-01 上传
2009-10-01 上传
2009-10-01 上传
2009-10-01 上传
2009-10-01 上传
2009-10-01 上传
2009-10-01 上传
2009-10-01 上传

thcx
- 粉丝: 1
- 资源: 54
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建基于Django和Stripe的SaaS应用教程
- Symfony2框架打造的RESTful问答系统icare-server
- 蓝桥杯Python试题解析与答案题库
- Go语言实现NWA到WAV文件格式转换工具
- 基于Django的医患管理系统应用
- Jenkins工作流插件开发指南:支持Workflow Python模块
- Java红酒网站项目源码解析与系统开源介绍
- Underworld Exporter资产定义文件详解
- Java版Crash Bandicoot资源库:逆向工程与源码分享
- Spring Boot Starter 自动IP计数功能实现指南
- 我的世界牛顿物理学模组深入解析
- STM32单片机工程创建详解与模板应用
- GDG堪萨斯城代码实验室:离子与火力基地示例应用
- Android Capstone项目:实现Potlatch服务器与OAuth2.0认证
- Cbit类:简化计算封装与异步任务处理
- Java8兼容的FullContact API Java客户端库介绍
