智能优化:插电式混动车能量管理与基因算法
需积分: 9 60 浏览量
更新于2024-09-07
收藏 2.22MB PDF 举报
本文探讨了"能源管理在功率分段插电式混合动力电动汽车中的应用:基于遗传算法和二次规划优化"。作者郑晨、克里斯·楚宁·米*、瑞雄、徐俊和尤晨文来自美国密歇根州迪尔伯恩大学,他们针对这类车辆设计了一种智能控制器,旨在提高其燃油效率。
研究的核心内容包括以下几个关键点:
1. 智能控制器开发:为了实现插电式混合动力汽车(PHEV)的高效能源管理,研究人员构建了一个在线和智能化的控制策略。这涉及到实时监控和动态调整电力系统的运行,以适应驾驶条件的变化。
2. 电池与燃油率的关系建模:通过二次方程模拟技术,论文描述了电池电流与燃油消耗之间的数学关系,这有助于预测不同行驶阶段下的能源消耗,并为决策提供依据。
3. 引擎启动优化:利用遗传算法(GA),研究者提出了一个方法来优化发动机的启动功率阈值。这个过程是迭代的,旨在找到最小化燃料消耗的同时满足驾驶性能需求的最佳点。
4. 电池电流优化:结合二次规划(QP)算法,研究人员计算出在发动机工作状态下最优的电池电流分配,以最大化电池使用效率并延长电池寿命。
5. 考虑电池健康状态:在整个能量管理系统中,电池的状态健康状况(SOH)被纳入考量,确保算法在考虑电池老化和容量下降的情况下仍能保持高效。这是提高系统长期可持续性的重要步骤。
6. 论文进展与关键词:文章于2013年6月18日首次接收,经过修订后于9月13日接受,并于9月20日正式发表,同年9月30日在线发布。关键词包括燃油率、遗传算法、插电式混合动力车、二次规划以及电池状态(SOC)和状态健康(SOH)。
本文提供了一种创新的能源管理策略,通过结合高级优化算法和对电池健康状况的考虑,旨在提升功率分段插电式混合动力汽车的能效,对推动电动车技术的发展具有重要意义。
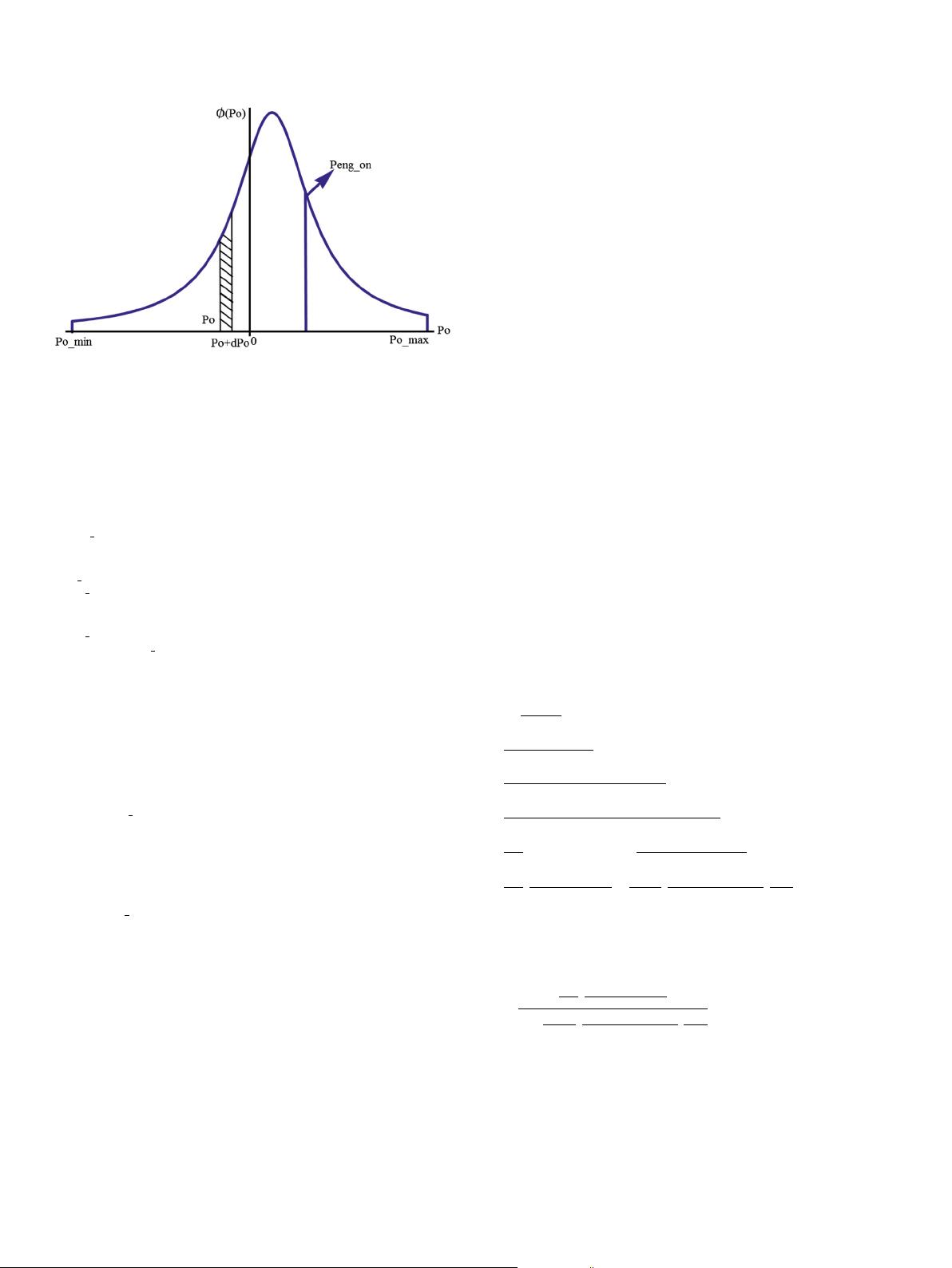
Suppose the total trip duration is t_total, and the power
threshold at which the engine is turned on is P
eng_on
, as shown in
Fig. 2. It means that when the driveline power is less than P
eng_on
,
the vehicle is powered by the battery only, and when the driveline
power is more than P
eng_on
, the engine will be turned on and the
vehicle is powered by the engine and battery together. Now, we can
easily get,
8
>
>
>
>
>
>
>
>
>
>
<
>
>
>
>
>
>
>
>
>
>
:
Z
P
eng on
P
o min
F
ð
P
o
Þ
dP
o
¼ t
off
Engine off
Z
P
o max
P
eng on
F
ðP
o
ÞdP
o
¼ t
on
Engine on
t
off
þ t
on
¼ t total
(3)
where P
o
is the driveline power,
F
(P
o
) represents the ratio of a
whole trip duration when the driveline power is within the interval
P
o
and P
o
þ dP
o
, P
o_min
and P
o_max
are the minimum and maximum
driveline power, t
off
and t
on
are the engine off and on duration
respectively. From this point, how to determine the optimal P
eng_on
becomes very critical, which can influence the engine-on time and
thus influence the fuel-consumption. Based on Eq. (3), we can get,
8
>
>
>
>
>
>
>
>
>
>
<
>
>
>
>
>
>
>
>
>
>
:
D
1
¼
Z
P
eng on
P
min
IðP
o
Þ
F
ðP
o
ÞdP
o
D
2
¼
Z
P
max
P
eng on
IðP
o
Þ
F
ðP
o
ÞdP
o
D
1
þ
D
2
¼ C$
D
SOC
(4)
where
D
1
and
D
2
are the SOC variation when engine is off and on, I
is the battery current, C is the battery capacity,
D
SOC is the SOC
difference between the ending value and the initial value. In the
paper, the ending SOC is set to 30%, so we can get
D
SOC˛½ 0 70% (5)
According to Eq. (4), P
eng_on
can determine
D
1
and
D
2
, however,
it cannot determine the battery current when the engine is on. As
shown in Fig. 3, we need to determine the battery current (battery
power) when the engine is on.
Based on the above discussion, the fuel-consumption can be
influenced by the engine-on power threshold and the battery cur-
rent when the engine is on. Therefore, the engine-on power
threshold should be determined and the relationship between the
engine fuel-rate and battery current should be built. Hence, the
vehicle powertrain needs to be analyzed in detail first.
2.2. Vehicle powertrain analysis
The powertrain structure of the power-split PHEV analyzed in
the paper is shown in Fig. 4. It consists of a gasoline ICE, a lithium-
ion battery pack, two electric motors, and a planetary gear set
which connects the motor, engine, and the final driveline together
with a predetermined gear ratio [1,2,9]. Table 1 lists the vehicle
parameters, and Fig. 4 details the powertrain structure.
From Fig. 4, P
o
equals the sum of P
r
and P
mot1
, i.e.,
P
o
¼ T
o
w
o
¼ P
r
þ P
mot1
¼ T
r
w
r
þ T
mot1
w
mot1
(6)
where T
r
, T
o
, and T
mot1
denote the torque of ring gear of the plan-
etary gear set, driveline, and motor 1, w
r
, w
o
, and w
mot1
denote their
speeds respectively. We can get
8
<
:
T
o
¼ðT
r
þ T
mot1
r
mot1
Þ$r
final
w
mot1
¼ w
o
=
r
final
r
mot1
w
r
¼ w
o
=r
final
(7)
where r
final
, and r
mot1
are the gear ratios between driveline and
vehicle wheels, motor 1 and driveline, respectively. The planetary
gear set consists of a ring gear, a sun gear, and carrier [2,9], which
connects driveline, motor 2, and the engine respectively. Neglecting
inertia losses and friction, there are two basic equations for torque
and speed of the planetary gear set
T
e
¼ð1 þ 1=
r
Þ$T
mot2
¼ð1 þ
r
Þ$T
r
ð1 þ
r
Þ$w
e
¼
r
$w
mot2
þ w
r
(8)
where
r
is the ratio between sun gear and ring gear, w
mot2
, w
e
denote the speed of motor 2, engine, and T
mot2
and T
e
are their
torques. Based on Eqs. (6)e(8), we can calculate T
e
further
T
e
¼
T
o
T
mot1
1þ
r
¼
T
o
P
mot1
=
ð
r
final
w
o
Þ
1þ
r
¼
T
o
ðP
b
P
a
P
mot2
Þ$
h
mot1
=
ð
r
final
w
o
Þ
1þ
r
¼
T
o
ðP
b
P
a
T
mot2
w
mot2
=
h
mot2
Þ$
h
mot1
=
ð
r
final
w
o
Þ
1þ
r
¼
1
1þ
r
$
h
T
o
P
b
P
a
T
e
$
ð
ð1þ
r
Þ$w
e
r
final
w
o
Þ
h
mot2
ð
r
þ1Þ
$
h
mot1
=
r
final
w
o
i
¼
1
1þ
r
$
T
o
ðP
b
P
a
Þ$
h
mot1
r
final
w
o
þ
1
ð1þ
r
Þ
2
$
ð
ð1þ
r
Þ$w
e
r
final
w
o
Þ
r
final
w
o
$
h
mot1
h
mot2
$T
e
(9)
where
h
mot1
and
h
mot2
represent efficiencies of motor 1 and motor
2. Solving Eq. (9), we can get
T
e
¼
1
1þ
r
$
T
o
ðP
b
P
a
Þ$
h
mot1
r
final
w
o
1
1
ð1þ
r
Þ
2
$
ð
ð1þ
r
Þ$w
e
r
final
w
o
Þ
r
final
w
o
$
h
mot1
h
mot2
¼ gðT
o
; P
b
; w
o
; w
e
Þ (10)
From Eq. (10), T
e
can be determined by P
b
, T
o
, w
o
, and w
e
. P
b
can
be approximately calculated using battery open circuit voltage V
ocv
,
battery current I, and battery internal resistance R [8],
P
b
¼ V
ocv
I þ I
2
R (11)
Hence, according to Eqs. (10) and (11), Eq. (2) can be changed to
m
f
¼ f ðT
e
; w
e
Þ¼f
new
ðT
o
; w
o
; I; w
e
Þ (12)
Fig. 2. Idealized vehicle driveline power distribution.
Z. Chen et al. / Journal of Power Sources 248 (2014) 416e426418
剩余10页未读,继续阅读
2013-11-14 上传
2018-03-20 上传
2021-02-07 上传
2010-02-13 上传
2022-07-14 上传
2018-10-10 上传
2021-02-07 上传
2022-07-14 上传
2024-10-09 上传
2021-05-29 上传

Heroluishin
- 粉丝: 11
- 资源: 12
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
