FANUC机器人编程标准V1.1.1:零位校核与TCP设定教程
版权申诉
7 浏览量
更新于2024-07-03
收藏 2.53MB PDF 举报
FANUC机器人编程标准V1.1.1是针对FANUC机器人编程的重要参考资料,包含了机器人及外部轴的校准和TCP(工具中心点)设定的具体步骤。以下是关键知识点的详细解读:
1. **机器人零位校核程序**:
- 通过编写名为ROBOT1_ZERO的程序(多机器人工作站中会依次为ROBOT2_ZERO、ROBOT3_ZERO等),利用positionreg61(R1.ZERO)、positionreg62(R2.ZERO)和positionreg63(R3.ZERO)来记录机器人六个轴的零位标记位置。这个程序适用于出厂新机器人且零位未丢失的情况。
2. **POSITIONREG位置寄存器**:
- positionreg61-63用于存储机器人的关节位置信息,用于校准和监控。
3. **切换到JOINT模式**:
- 在POSITION-REPRE模式下,将positiondetail中的机器人轴位置设为0,以便进行零位校准。
4. **零位码盘值存储**:
- 在Menu-system-variables中,$dmr_grp(1)-$master_coun显示的数值记录了机器人各轴的码盘值,初次开机时应拍照保存。
5. **外部轴零位校核**:
- 外部轴零位设定需要手动操作,包括旋转至机械零位标记、启用master_enable、调用cal功能选择ZEROPOSITIONMASTER选项,并确保GROUP设置正确。
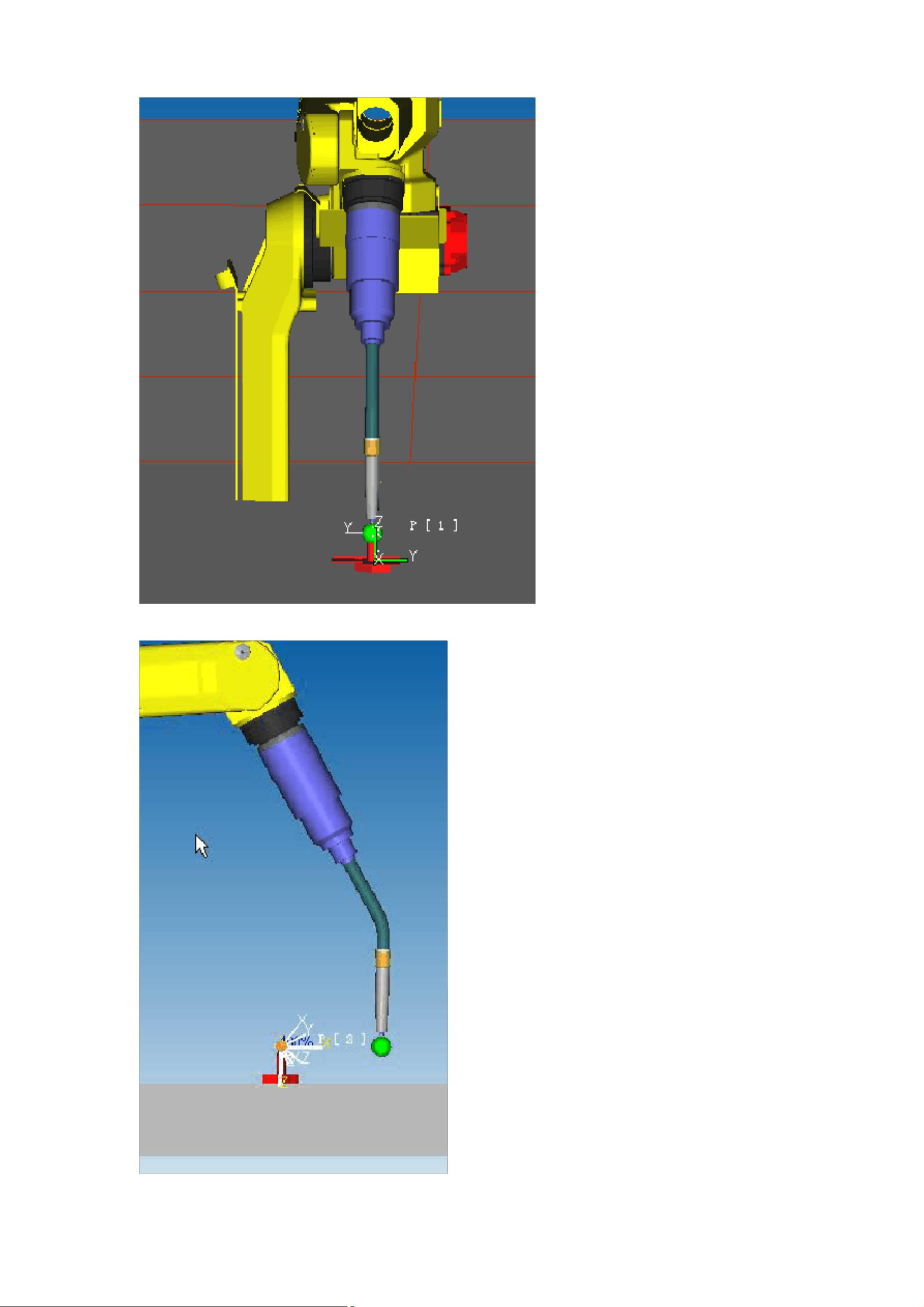
6. **工具中心点TCP设定**:
- 对于弧焊焊枪,推荐采用6点XZ法进行标定,TCP(工具中心点)设在焊丝伸出导电嘴前端15mm处。标定过程中,机器人姿态需要充分变化,确保工具坐标系的方向明确,便于调试和后续操作。
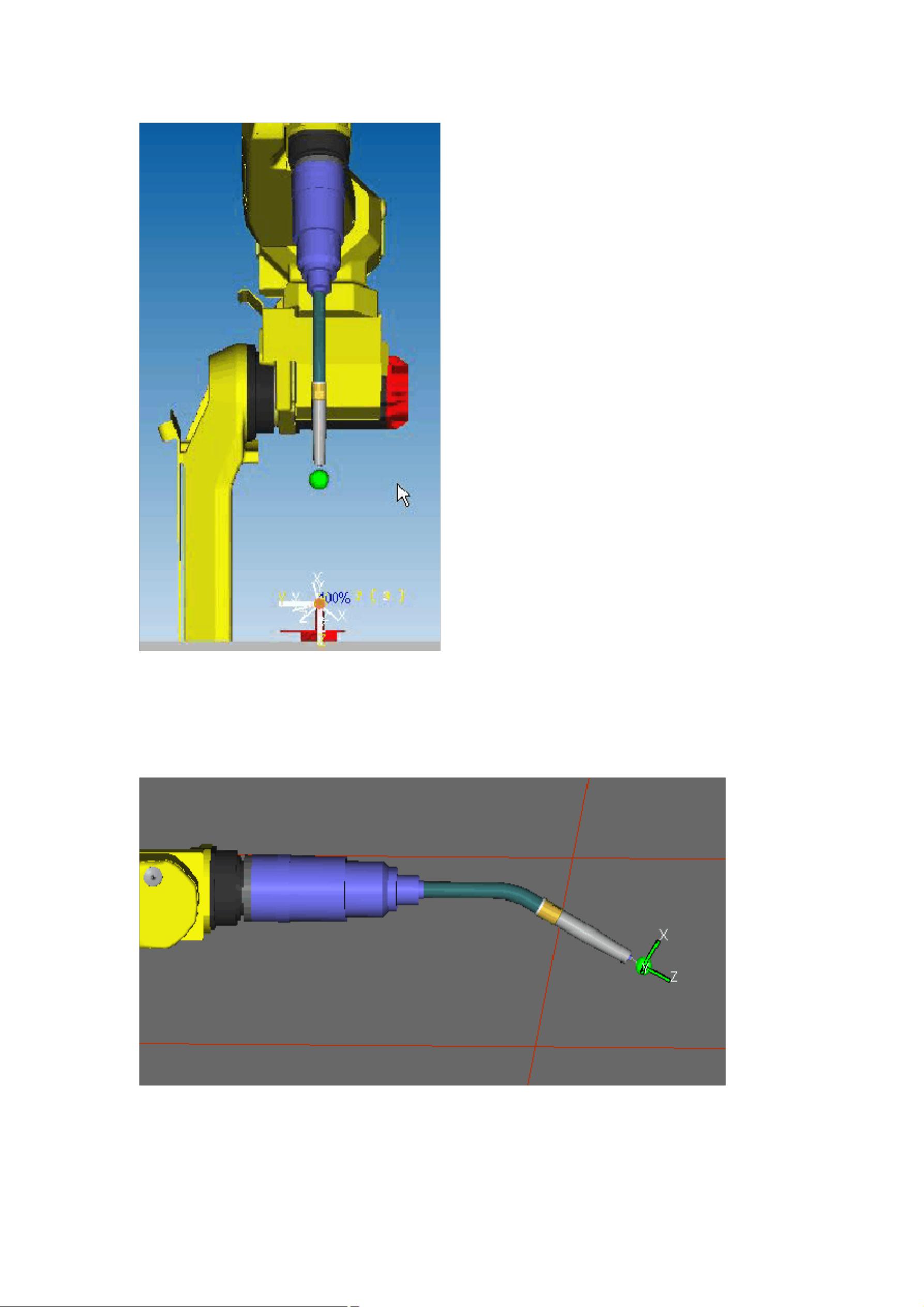
7. **TCP方向定义**:
- 标定完成后,工具坐标系Z轴沿鹅颈向下,X轴向前延伸在焊枪平面上,确保TCP方向的准确性。
8. **注意事项**:
- 在执行任何校准或编程操作时,务必遵循FANUC官方的指导,以保证机器人动作的精确性和安全性。
通过这份编程标准,用户可以了解到如何正确地校准FANUC机器人以及如何设置工具中心点,这对于工业生产线上的机器人操作员和维护人员来说是非常实用的参考资料。在实际应用中,结合设备的具体型号和工作环境,合理运用这些步骤可以提高生产效率并减少潜在错误。
第 5 点,向机器人正前方运动 200mm,确定工具坐标系 X+方向
剩余43页未读,继续阅读
2020-09-22 上传
2024-02-10 上传
2008-03-20 上传
2008-11-07 上传
2020-10-27 上传
2022-03-17 上传

G11176593
- 粉丝: 6830
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM动力电池数据管理系统源码及数据库详解
- R语言桑基图绘制与SCI图输入文件代码分析
- Linux下Sakagari Hurricane翻译工作:cpktools的使用教程
- prettybench: 让 Go 基准测试结果更易读
- Python官方文档查询库,提升开发效率与时间节约
- 基于Django的Python就业系统毕设源码
- 高并发下的SpringBoot与Nginx+Redis会话共享解决方案
- 构建问答游戏:Node.js与Express.js实战教程
- MATLAB在旅行商问题中的应用与优化方法研究
- OMAPL138 DSP平台UPP接口编程实践
- 杰克逊维尔非营利地基工程的VMS项目介绍
- 宠物猫企业网站模板PHP源码下载
- 52简易计算器源码解析与下载指南
- 探索Node.js v6.2.1 - 事件驱动的高性能Web服务器环境
- 找回WinSCP密码的神器:winscppasswd工具介绍
- xctools:解析Xcode命令行工具输出的Ruby库
