无人机飞行控制技术:设计与MATLAB仿真
版权申诉
76 浏览量
更新于2024-06-13
收藏 1.71MB DOCX 举报
"无人机飞行控制器的设计与仿真,利用MATLAB进行建模和仿真,适用于计算机、电子信息工程、数学等专业学生的学习与设计项目。"
在无人机技术领域,飞行控制器是确保飞行性能和任务完成的关键组件。这篇文档详细探讨了如何设计和仿真无人机飞行控制器,特别是在MATLAB环境下进行操作。首先,它概述了无人机在各领域的广泛应用,如军事侦察、商业运输、科学研究和民用服务,强调了精确控制技术对于提升无人机性能和任务效率的重要性。
文档的主体部分涉及了飞行控制技术的基础,包括无人机的飞行动力学和空气动力学模型的建立。利用MATLAB软件,这些非线性模型被线性化,以便进行控制器设计。由于无人机的对称性,它的纵向和横向运动可以相对独立地进行控制,这为控制器的分块设计提供了便利。
在MATLAB环境中,作者按照传统的控制设计方法,对纵向和横向运动分别进行了控制器设计。这种逐环闭合的方法确保了每个运动方向的稳定性。设计完成后,通过MATLAB的仿真功能,对控制器进行了验证,以检验其在实际飞行中的表现。
关键词涵盖了无人机飞行控制系统的核心元素,如纵向运动控制和横航向运动控制。这些控制子系统对于维持无人机的飞行姿态、路径跟踪和稳定至关重要。仿真结果能够评估控制器在不同飞行条件下的性能,帮助优化设计,减少实际飞行试验的风险。
此外,这份文档还适合不同层次的学习者,从大学生的课程设计到毕业论文,为他们提供了一个实践性的平台,利用MATLAB的参数化编程特性,可以方便地调整参数,测试不同控制策略的效果。这不仅加深了对控制理论的理解,也锻炼了实际编程和问题解决的能力。
这个资源为无人机飞行控制的研究提供了全面的理论框架和实用工具,是学习和探索这一领域不可或缺的参考资料。通过学习和应用这些方法,研究人员和工程师能够开发出更加先进、适应性强的无人机控制系统,推动无人机技术的持续发展。
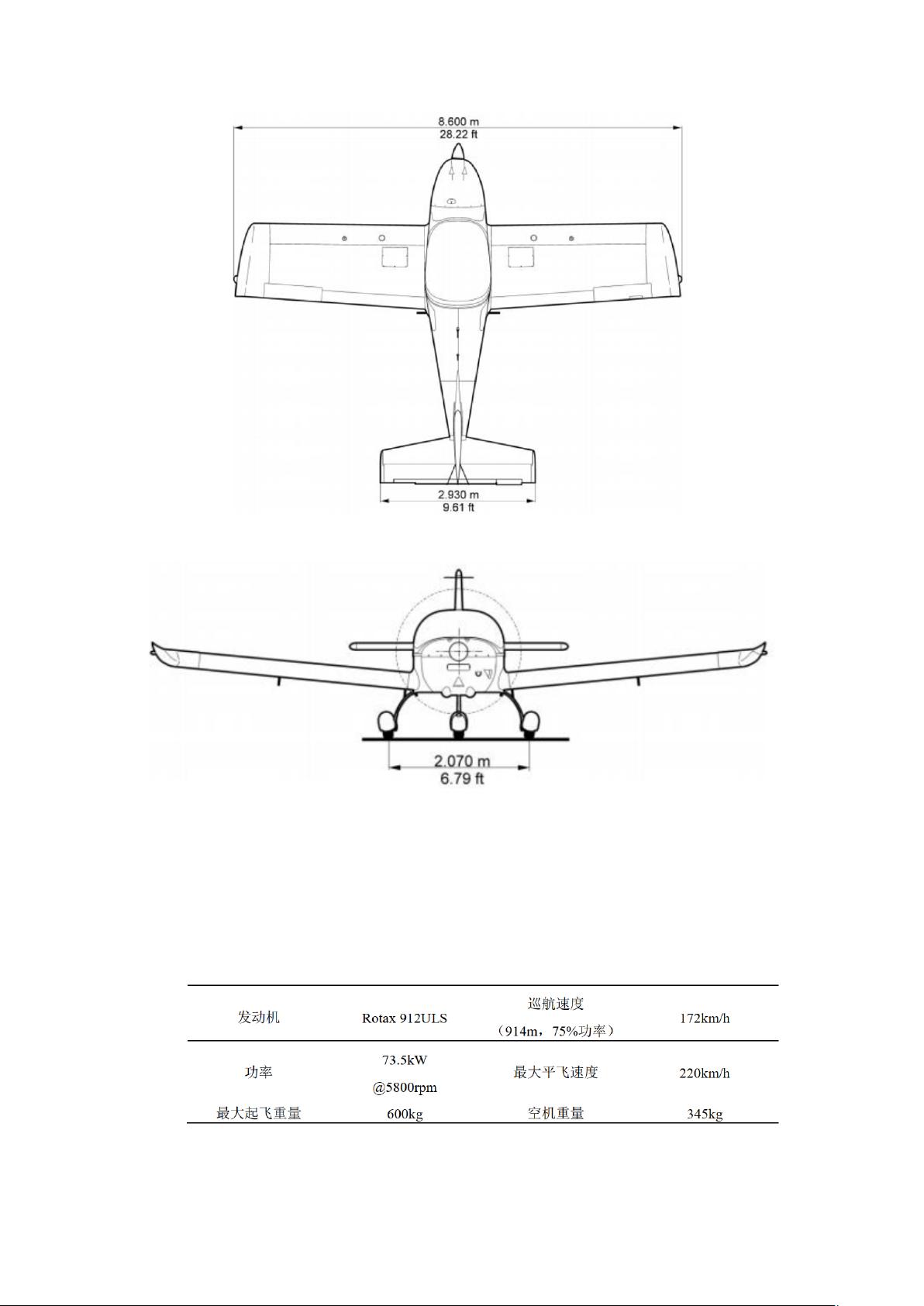
图 2.1.2 无人机俯视图
图 2.1.2 无人机主视图
图 2.1 无人机结构三视图
为了配合控制系统状态空间的建模工作,表 2.1 详列了飞机的基础性能参数,
而表 2.2 至 2.4 则明确了飞机主要组件的几何参数。
表 2.1 飞机基本性能参数
表 2.2 机翼几何参数
剩余32页未读,继续阅读
2023-04-22 上传
2023-10-18 上传
2023-04-22 上传
2022-06-03 上传
2021-11-17 上传
2022-07-13 上传

matlab科研助手
- 粉丝: 3w+
- 资源: 5981
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
