智能小车设计与实现:AT89S52单片机控制的循迹避障系统
"这篇文档是一份关于智能小车设计的毕业论文摘要,主要涉及智能小车的硬件构建和控制算法,特别关注了循迹避障功能。论文中介绍的智能小车采用AT89S52单片机作为核心控制器,通过金属感应器和霍尔元件来实现对环境的感知和速度测量,1602LCD用于实时显示行驶数据。"
智能小车是一种集成了自动化技术和电子技术的创新项目,它能够自主地根据预设程序或环境反馈进行操作,无需人工干预。在本文提到的简易智能小车设计中,AT89S52单片机扮演了关键角色,它是小车的“大脑”,负责处理从传感器接收的信息并控制小车的动作。
路面检测模块利用金属感应器TL-Q5MC来探测道路上的铁片,这些铁片可以被视为路径标记,小车通过感应铁片的存在来确定自己的位置和行驶方向,实现循迹功能。同时,这些反馈信号使得小车可以根据预设模式在不同的区域以不同的速度行驶,甚至能沿着S形路径行进。
测速模块则采用了霍尔元件A44E,这是一种基于磁敏感效应的传感器,可以精确地测量小车的行进速度。这对于控制小车的速度和确保行驶稳定性至关重要。
LCD显示模块采用1602LCD屏幕,能实时显示小车的行驶时间、行驶距离、平均速度以及各速度区间行驶的时间。这种可视化界面提高了小车的人性化程度,让使用者可以直观地了解小车的状态。
控速模块根据单片机接收到的信号和预设的模式,调整电机驱动,从而控制小车的速度。模式选择模块允许用户根据需求选择不同的工作模式,增加了小车的灵活性和适应性。
此外,论文还提到了复位电路模块,这是为了在小车出现异常时能快速恢复到初始状态。而最小系统则是构成整个智能小车的基础,包含了电源、微控制器和其他必要的硬件组件。
总体而言,这篇毕业论文详细阐述了一个基于AT89S52单片机的智能小车设计,涵盖了从硬件选择、传感器应用到控制系统设计的全过程,展示了智能小车如何通过自动化技术实现在特定环境下的自主导航和行驶。
图
.系统的具体设计与实现:
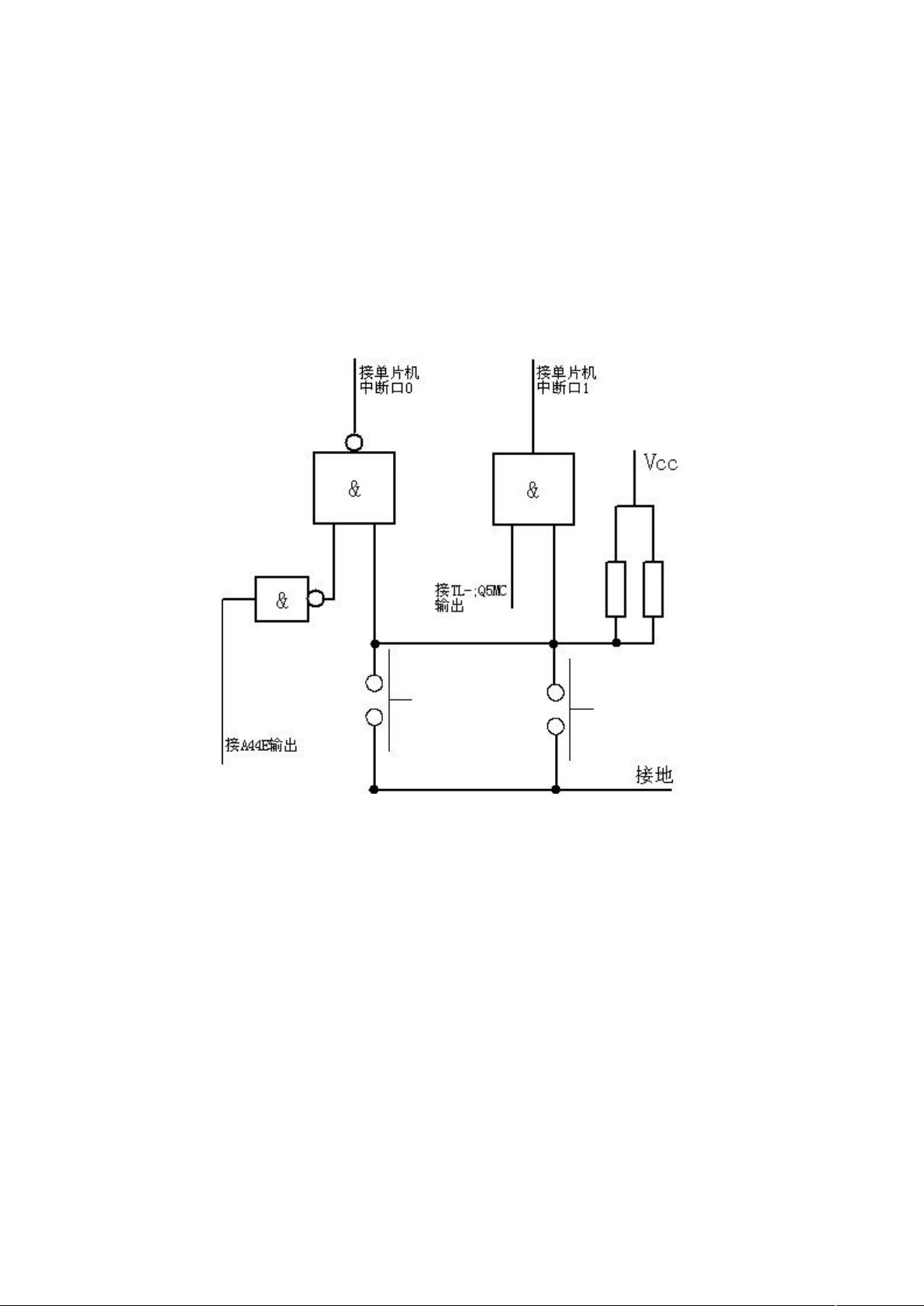
路面检测模块:
应用一个金属感应器,安装在车盘下,离地略小于或约四毫米。当金属传感器检测
到铁片时将对单片机发送中断信号,单片机运行中断,改变输给电机驱动信号的电压
占空比来控制小车的速度。
显示模块:
采用 ,由单片机的总线模式连接。为节约电源, 的背光用单片机
进行控制。
测速模块:
通过霍尔元件感应磁铁来产生脉冲(当霍尔元件在离磁场较近时输出会是高电平,
其它时候是低电平),一个车轮均匀放四个小磁铁,计算一秒所得的脉冲数,从而计
算出一秒小车轮子转动圈数,再测量出小车车轮周长即可计算出小车当前速度,累加
可得到当前路程。
控速模块:
考虑到元器件的缺少以及我们所用的电路的驱动电机的电路原理图和和小车自带
的电路的电机驱动原理图一样,所以暂时使用小车自带的电机驱动电路图。
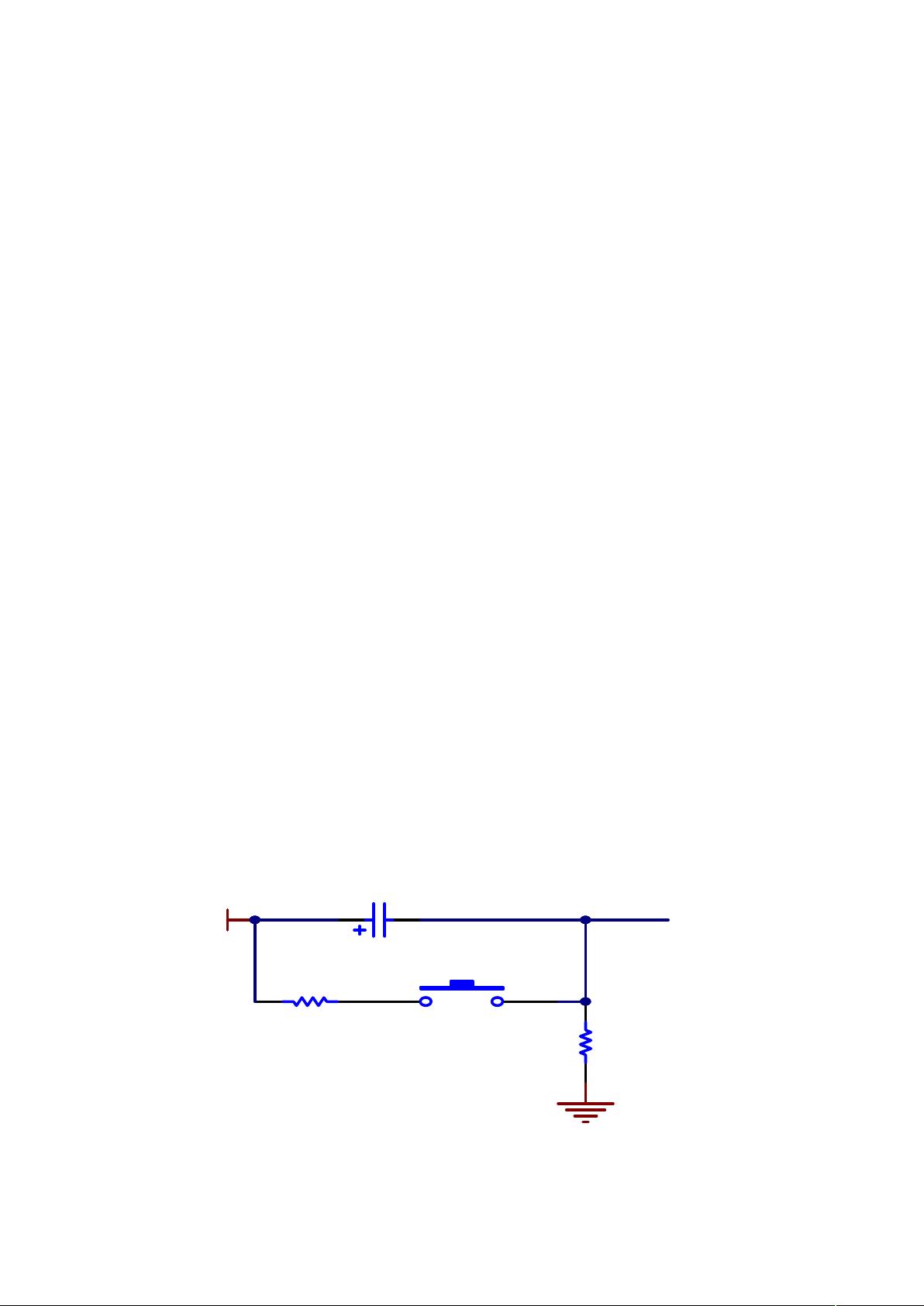
复位电路模块:
单片机的复位电路通过手动来实现,复位电路图如(图 )所示。
22u
VCC
200
1K
RST
剩余63页未读,继续阅读
2020-07-31 上传
2012-03-03 上传
2021-09-16 上传
2021-09-18 上传
2024-03-10 上传
2021-09-15 上传

wumingcong2012
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- ConsoleApplication1-伪线程及独立栈.zip
- Theo.QuartzDemo
- Nginx Limit Proxy-开源
- 红旗飘呀飘flash动画
- gitbash:更好的git使用bash设置
- CppE4X:一个cpp版本的XML解析器,类E4X语法
- 简单多边形三角化最佳剖分算法多线程滚动条图形编程Java源程序
- 探索性分析_测试
- Xcode-gitignore:Xcode 5〜6的gitignore文件
- ddr0-watcher:ddr.ca的监视程序(ddr0.github.com)
- java代码-递归-求最大值
- MyPHPPictureGallery-开源
- octoblob:用于OCT和OCTA处理的Python工具
- ghiblog:knightyui博客
- angelvisit
- java实现病历管理系统.rar
