PID算法详解:控制大师M.J.威利斯的深度解析
需积分: 10 126 浏览量
更新于2024-12-12
收藏 182KB PDF 举报
PID算法解析是Dr M.J. Willis教授在University of Newcastle化工与过程工程系的一份重要教学材料,撰写于1998年11月,更新至1999年10月。这份文档旨在详细介绍Proportional-Integral-Derivative (PID) 控制算法,它是工业过程中最常用的反馈控制器之一,已有超过50年的成功应用历史。PID算法以其稳定性、易理解性和出色的控制性能,能够适应各种动态过程系统的特性。
该文档的目的是使学生掌握PID控制的基本原理,包括:
1. PID控制算法介绍:首先,学生将了解PID算法的名称来源,它由比例(Proportional)、积分(Integral)和微分(Derivative)三个基本部分组成,这三个组件协同工作以实现精确的系统控制。
2. 三种模式的作用:讲解每种模式的作用及其在控制策略中的关键角色。比例控制主要针对当前偏差,确保快速响应;积分控制负责消除稳态误差,确保最终目标的实现;而微分控制则预测未来趋势,防止系统过度反应或滞后。
3. 算法结构探讨:深入分析不同PID算法结构,可能涉及单回路、多回路、自适应PID等,让学生了解如何根据具体应用选择最合适的控制架构。
4. 调优方法的历史发展:回顾过去50年来在PID控制调优方法上的改进,如Ziegler-Nichols法、自适应PID调整、模型参考自适应控制等,帮助学生了解如何随着时间的推移不断优化控制性能。
5. 目标和学习成果:课程结束后,学生应能以专业和高效的方式解决闭环控制系统调优问题,并具备调优PID算法的能力,这对于他们在工业实践中实现有效控制至关重要。
通过阅读这份资料,学生不仅会理解PID算法的核心概念,还能掌握实际应用中的调试技巧和优化策略,从而在工业自动化领域取得竞争优势。
3
output automatically over time
2
. The adjustable parameter to be specified is
the integral time (Ti) of the controller.
Where does the term reset come from?
Reset is often used to describe the integral mode. Reset is the time it takes
for the integral action to produce the same change in mv as the P modes
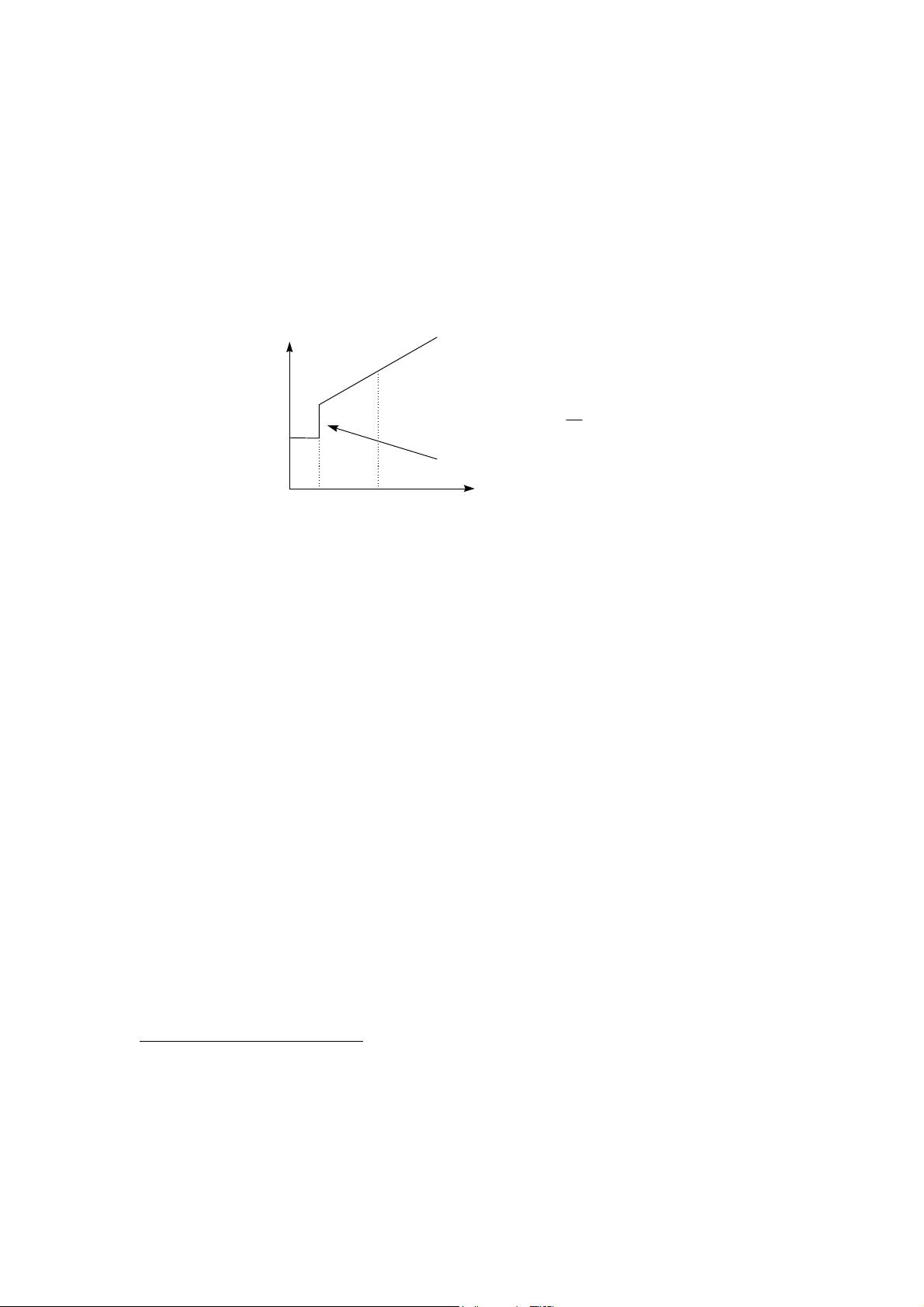
initial (static) change. Consider the following figure,
Open Loop Response of a
PI controller to a step in ‘e’
0T
i
time
mv
Initial step due to P
of magnitude K
c
e
k
T
edt
c
i
1
∫
=
ke
c
Figure (1) The response of a PI algorithm to a step in error
Figure (1) shows the output that would be obtained from a PI controller given
a step change in error. The output immediately steps due to the P mode. The
magnitude of the step up is K
c
e . The integral mode then causes the mv to
‘ramp’. Over the period 'time 0 to time T
I
'
the mv again increases by K
c
e.
Integral wind-up
When a controller that possesses integral action receives an error signal for
significant periods of time the integral term of the controller will increase at a
rate governed by the integral time of the controller. This will eventually cause
the manipulated variable to reach 100 % (or 0 %) of its scale, i.e. its
maximum or minimum limits. This is known as integral wind-up. A sustained
error can occur due to a number of scenarios, one of the more common being
control system ‘override’. Override occurs when another controller takes over
control of a particular loop, e.g. because of safety reasons. The original
controller is not switched off, so it still receives an error signal, which through
time, ‘winds-up’ the integral component unless something is done to stop this
occurring. There are many techniques that may be used to stop this
2
Different control manufacturers use different definitions for the integral mode of a controller. It can be
defined as minutes, minutes/repeat or repeats per minute. The difference is very important to note so as
to ensure problems do not occur during a tuning exercise.
Remember the ‘name game’. T
i
is the integral
time (minutes), if specified as repeats / minute then it is 1/T
i
that must be entered into the controller,
while minutes / repeat is again T
i
. This is confusing and is compounded by the fact that manufacturers
are not consistent !
剩余12页未读,继续阅读
2022-05-30 上传
180 浏览量
2021-10-03 上传
2021-03-21 上传
2021-06-29 上传
107 浏览量
643 浏览量
2021-06-29 上传

sharingfun
- 粉丝: 1
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- LanYaAPP.zip
- rino-status:oca Ocavue的正常运行时间监控器和状态页面,由@upptime提供支持
- Simple Task Management App in JavaScript Free Source Code.zip
- 25个经典网站源代码.zip
- button style.rar
- kafka-service-interface:公开Kafka生产者和消费者API的Docker服务
- 西门子Safety电子学习解决方案.rar
- repmgr:PostgreSQL最受欢迎的复制管理器(Postgres)-最新版本5.2.1(2020-12-07)
- nvp-accessor:smple模块,用于访问名称-值对数组中的值
- Matlab_optical.zip_MATLAB 物理_MATLAB光学_matlab 几何光学_光学_物理光学
- 马修斯网站
- 基于python开发的中国关单数据查询免费软件v1.0下载
- Sticky Note Apps using JavaScript with Source Code.zip
- presentation-Website:演示的好网站
- spring.zip
- 高斯白噪声matlab代码-DDWD:数据驱动的小波
