PID控制详解:Simulink仿真情境下的参数调优
需积分: 10 125 浏览量
更新于2024-07-21
1
收藏 1.23MB PPT 举报
本章主要介绍了PID控制的基本概念和在Simulink环境下的应用。PID(Proportional-Integral-Derivative)控制是一种常见的控制策略,它在连续线性系统中广泛应用,以其简单易用、适应性强和鲁棒性好而闻名。PID控制主要包括比例(P)、积分(I)和微分(D)三个部分,它们分别对应于偏差e与时间的关系。
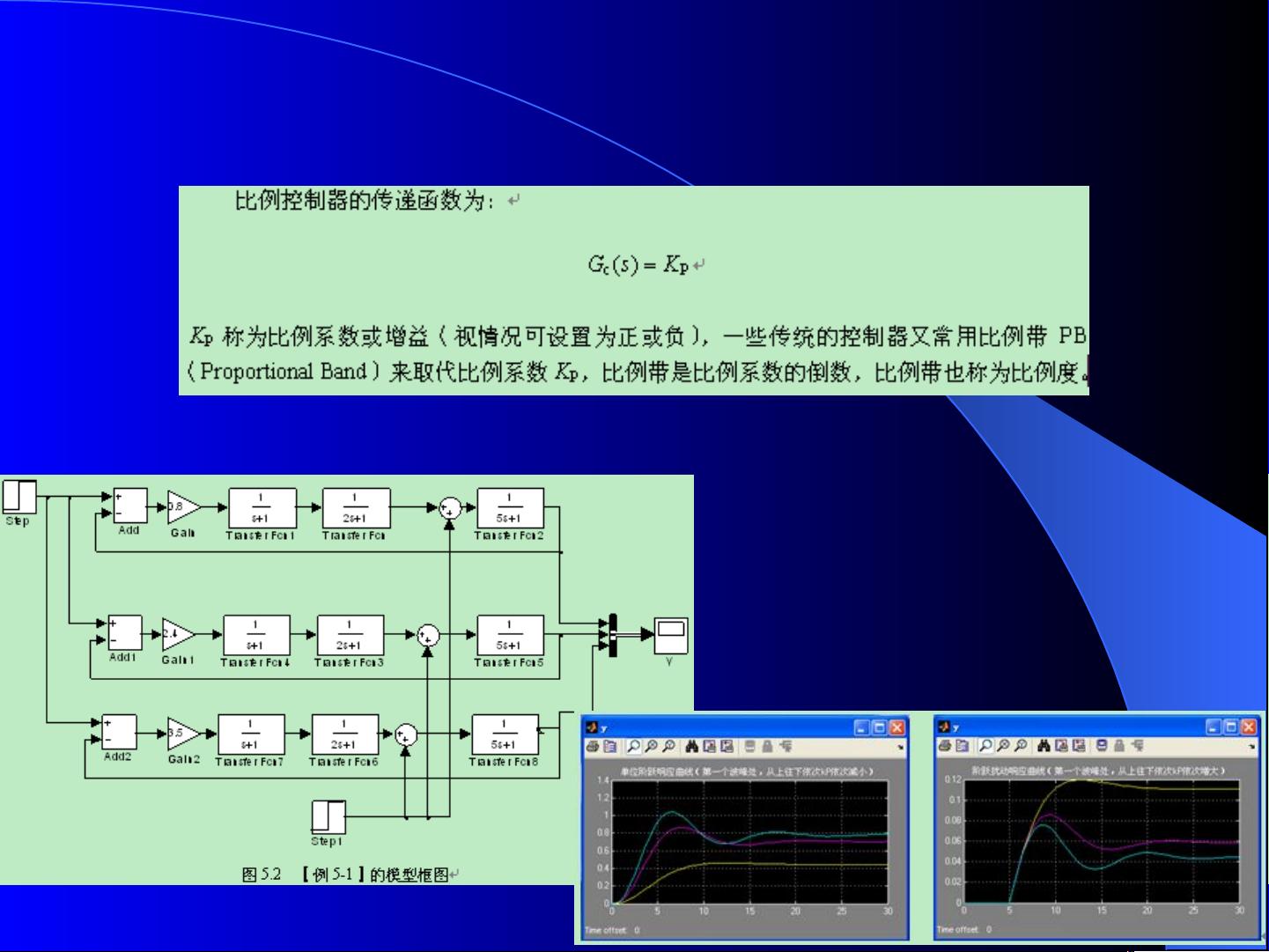
5.1 PID控制概述部分详细解释了比例、积分和微分控制的工作原理。比例控制根据误差的大小直接调整控制作用,积分控制则补偿累积误差,而微分控制则反应系统的速度变化,有助于快速响应。比例增益Kc、积分时间Ti和微分时间Td是PID控制器的关键参数。
5.2 PID控制算法部分深入讨论了不同组合的控制策略。纯比例控制(P)主要针对系统的瞬时响应,比例积分(PID)则结合了比例和积分,能够减少稳态误差并改善稳态性能。比例微分(PD)控制增强了动态响应,而PID控制则是这三种功能的综合,适用于需要快速准确响应的情况。
通过Simulink仿真,学习者可以直观地理解和操作PID控制器,掌握参数整定的方法。PID控制器参数整定是关键环节,通过调整Kc、Ti和Td,可以优化系统的性能,确保系统在面对变化的被控对象特性时仍能保持良好的控制效果。
总结来说,本章内容涵盖了PID控制的基础理论、控制算法的应用实例以及如何通过Simulink进行实际操作和参数调整。对于初学者和Matlab用户来说,这是一个理解和掌握PID控制的重要章节,有助于提升他们设计和调试控制系统的实践能力。通过阅读和实践,读者将能够全面理解PID控制的原理,熟练地运用Simulink进行PID控制器的设计与优化。
5.2 PID
5.2 PID
控制算法
控制算法
5.2.1 比例( P )控制
纯比例控制的作用和比例调节对系统性能的影响
剩余16页未读,继续阅读
237 浏览量
2021-10-01 上传
2023-06-07 上传
2023-03-25 上传
2024-05-02 上传
2023-05-27 上传
2023-05-25 上传
2023-11-08 上传

liu_si_yu
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新代数控API接口实现CNC数据采集技术解析
- Java版Window任务管理器的设计与实现
- 响应式网页模板及前端源码合集:HTML、CSS、JS与H5
- 可爱贪吃蛇动画特效的Canvas实现教程
- 微信小程序婚礼邀请函教程
- SOCR UCLA WebGis修改:整合世界银行数据
- BUPT计网课程设计:实现具有中继转发功能的DNS服务器
- C# Winform记事本工具开发教程与功能介绍
- 移动端自适应H5网页模板与前端源码包
- Logadm日志管理工具:创建与删除日志条目的详细指南
- 双日记微信小程序开源项目-百度地图集成
- ThreeJS天空盒素材集锦 35+ 优质效果
- 百度地图Java源码深度解析:GoogleDapper中文翻译与应用
- Linux系统调查工具:BashScripts脚本集合
- Kubernetes v1.20 完整二进制安装指南与脚本
- 百度地图开发java源码-KSYMediaPlayerKit_Android库更新与使用说明
