CAN-bus网络拓扑与传输介质解析
需积分: 20 59 浏览量
更新于2024-07-18
收藏 165KB PDF 举报
"CAN-bus_网络拓扑结构和传输介质.pdf"
CAN-bus(Controller Area Network,控制器局域网络)是一种高效、可靠的通信协议,广泛应用于汽车电子、自动化设备、工业控制等领域。此文档详细介绍了CAN-bus的网络拓扑结构和传输介质。
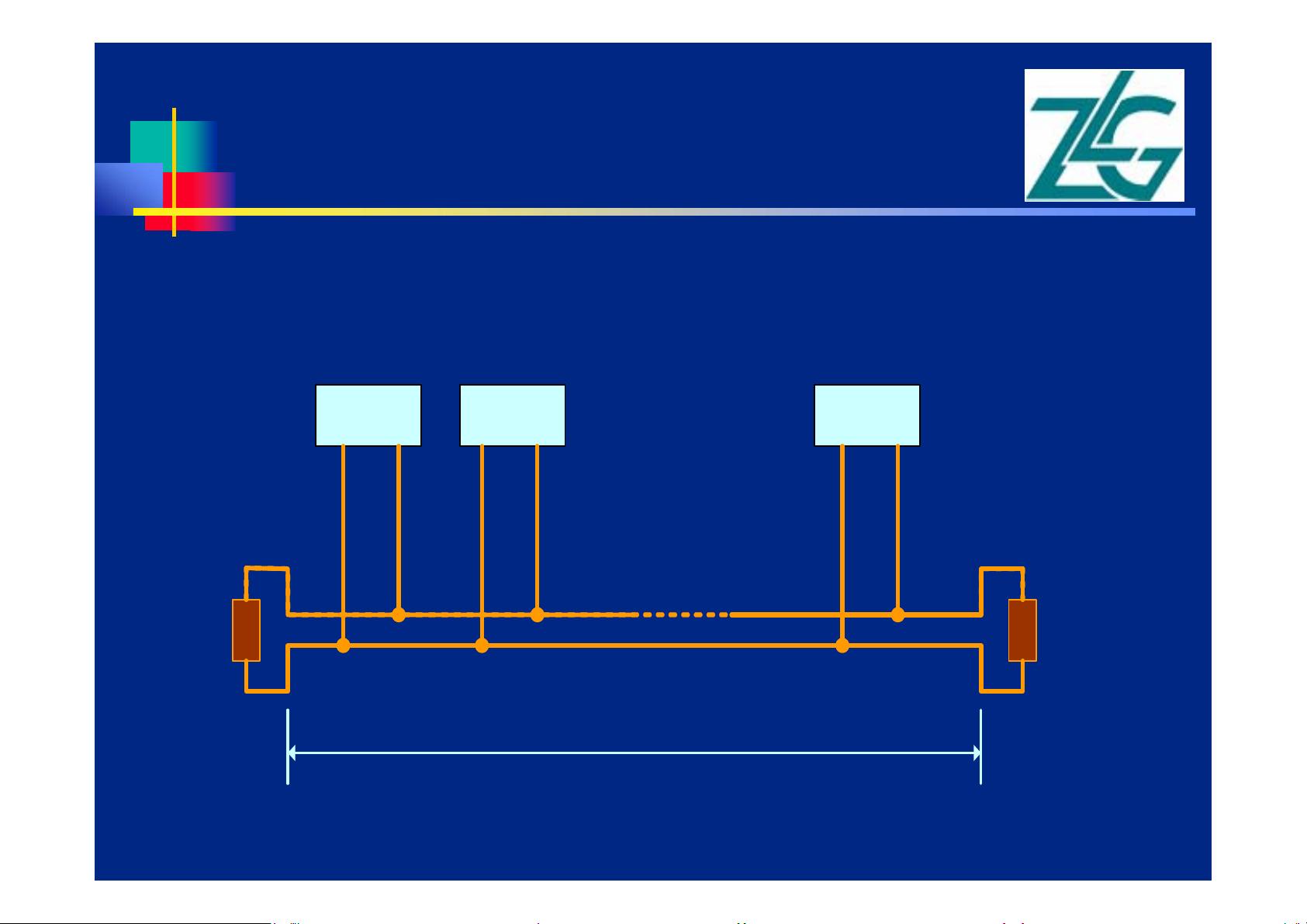
在CAN-bus的网络拓扑中,主要的结构类型是线性拓扑,这也是由ISO11898标准所定义的一种单线结构。线性拓扑通常采用主干线和支线的形式,允许多个节点通过支线连接到主干线上。为了保证信号的稳定传输,主干线的两个终端会配置终端电阻,而节点则通过无端接的支线接入,这种方式可以减少信号反射,提高通信质量。
CAN-bus的传输介质的选择直接影响其通信性能和可靠性。常见的传输介质包括双绞线、同轴电缆、光纤等。双绞线因其成本低、安装方便,常用于短距离通信;同轴电缆提供更好的屏蔽效果,适用于电磁环境复杂的场合;光纤则提供更长的传输距离和更高的抗干扰能力,但成本较高,多用于需要长距离传输或电磁干扰严重的环境中。
CAN-bus底层协议是构建CAN网络的基础,主要包括物理层和数据链路层。CAN2.0规范分为两部分:CAN2.0A和CAN2.0B。CAN2.0A仅支持标准报文格式,而CAN2.0B则增加了扩展报文格式,允许更多的标识符,从而扩展了网络的数据传输能力。此外,CAN-bus的国际标准ISO11898为设计和实现CAN应用系统提供了具体指导,确保了不同厂商设备之间的互操作性。
在实际应用中,设计者需要根据系统的规模、通信需求以及环境条件选择合适的网络拓扑和传输介质,以满足系统的实时性、可靠性和经济性要求。例如,对于车辆内部的通信,可能采用星型或树状结构的支线连接,以便于节点的添加和维护;而在远程监控或分布式控制系统中,光纤可能成为首选的传输介质,以实现长距离、高速率且无噪声的通信。
理解CAN-bus的网络拓扑结构和传输介质对于设计和实施高效、稳定的CAN网络至关重要。设计者应综合考虑各种因素,以确保通信系统的性能和稳定性。
广州周立功单片机发展有限公司 www.zlgmcu.com 4
ISO11898
ISO11898
ISO11898
z ISO11898 CAN网络拓扑示意图
z
z
ISO11898 CAN
ISO11898 CAN
网络拓扑示意图
网络拓扑示意图
Node
1
Node
2
Node
n
… …
120 120
CAN Busline
CAN_H
CAN_L
L
剩余16页未读,继续阅读
2021-11-10 上传
2021-01-15 上传
2008-09-02 上传
2019-09-23 上传
155 浏览量
2019-12-31 上传
206 浏览量
405 浏览量

unsv29
- 粉丝: 1866
- 资源: 41
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
