禁忌搜索/路径重新链接算法在作业车间调度问题中的应用
需积分: 5 51 浏览量
更新于2024-08-13
收藏 515KB PDF 举报
"该资源是一篇研究论文,主要介绍了一种将禁忌搜索(Tabu Search)与路径重新链接(Path Relinking)算法结合的方法,用于解决作业车间调度问题(Job Shop Scheduling Problem, JSP)。论文作者包括Bo Peng、Zhipeng Lü、T.C.E. Cheng等人,发表于2014年8月19日。关键词涵盖了调度、作业车间、元启发式算法、禁忌搜索、路径重新链接以及混合算法。"
正文:
在优化领域,作业车间调度问题(JSP)是一个经典的组合优化问题,涉及到如何有效地安排一系列任务在多个工站之间的顺序和时间,以最小化总完成时间或最大化生产效率。这篇研究论文提出了一种新的算法,即禁忌搜索/路径重新链接(TS/PR)算法,旨在为JSP找到高质量解决方案。
禁忌搜索(Tabu Search)是一种常用的全局优化方法,它通过避免近期探索过的解来防止陷入局部最优,从而在搜索空间中进行更广泛的探索。路径重新链接(Path Relinking)则是一种强大的重启动策略,能够快速地从一个解决方案跳转到另一个解决方案,特别是在两种解决方案之间存在显著改进时。
TS/PR算法的独特之处在于它结合了这两种技术的优点。首先,算法中设计了一个特定的重新链接过程,可以有效地构建一条连接初始解决方案和指导解决方案的路径,这有助于跨越局部最优。其次,引入了一个基于两种改进方法的参考解决方案确定机制,以进一步提升算法性能。
在评估阶段,TS/PR算法被应用到几乎所有文献中可用的JSP基准实例上。测试结果显示,该算法能够获得与现有方法竞争的解决方案,证明了其在解决JSP问题上的有效性与优越性。这种混合算法的创新应用为解决复杂的调度问题提供了新的思路,并可能对实际工业生产环境中的调度优化带来积极影响。
这篇研究论文贡献了禁忌搜索与路径重新链接相结合的新算法,为解决作业车间调度问题提供了一个强大且有潜力的工具。该算法的特性在于其高效的路径构建策略和改进机制,使得在大量可能的解决方案中找到更好的解成为可能。这一工作对于理解和改进元启发式算法在解决实际问题中的应用具有重要意义。
Algorithm 1. Outline of algorithm TS/PR for JSP.
1: Input: J, M, and P
k
2: Output: C
max
and the best solution S
n
found so far
3:
P ¼fS
1
; …; S
p
g’Population_InitializationðÞ /
n
Section 2.2
n
/
4:
for i ¼f1; …; pg do
5:
S
i
’Tabu_SearchðS
i
Þ /
n
Section 2.3
n
/
6: end for
7:
S
n
¼ arg minff ðS
i
Þji ¼ 1; …; pg
8:
PairSet’fðS
i
; S
j
ÞjS
i
A P; S
j
A P and S
i
a S
j
g
9: repeat
10: Randomly select one solution pair {S
i
,S
j
} from PairSet
11:
S
p þ 1
’Path_RelinkingðS
i
; S
j
Þ,
S
p þ 2
’Path_RelinkingðS
j
; S
i
Þ /
n
Section 2.4
n
/
12:
S
p þ 1
’Tabu_Search lparS
p þ 1
Þ,
S
p þ 2
’Tabu_SearchðS
p þ 2
Þ /
n
Section 2.3
n
/
13:
if S
p þ 1
(or S
p þ 2
) is better than S
n
then
14:
S
n
¼ S
p þ 1
(or S
p þ 2
)
15: end if
16:
Tentatively add S
p þ 1
and S
p þ 2
to population P:
P
0
¼ P [fS
p þ 1
; S
p þ 2
g
17:
PairSet’PairSet [fðS
p þ 1
; S
k
ÞjS
k
A P and S
k
a S
p þ 1
g
18:
PairSet’PairSet [fðS
p þ 2
; S
k
ÞjS
k
A P and S
k
a S
p þ 2
g
19: Identify the two worst solutions S
u
and S
v
in the
temporary population P
0
20: Generate new population by removing the two worst
solutions S
u
and S
v
:
P ¼fS
1
; …; S
p
; S
p þ 1
; S
p þ 2
g\fS
u
; S
v
g
21: Update PairSet:
PairSet’PairSet\fðS
u
; S
k
ÞjS
k
A P and S
k
a S
u
g
PairSet’PairSet\fðS
v
; S
k
ÞjS
k
A P and S
k
a S
v
g
22: until a stop criterion is met
2.2. Initial population
In TS/PR, the initial population is constructed as follows:
Starting from scratch, we randomly generate a feasible solution
and then optimize the solution to become a local optimum using
our improvement method (see Section 2.3). The resulting improved
solution is added to the population if it does not duplicate any
solution currently in the population. This procedure is repeated
until the size of the population reaches the cardinality p.
2.3. Tabu search procedure
Our TS procedure is identical to the one used in the hybrid
evolutionary algorithm (HEA) presented in Cheng et al. [6].
Specifically, our TS procedure uses the neighborhood proposed
by Zhang et al. [23]. In addition, it stops if the optimal solution is
found or the best objective value has not been improved for a
given number of TS iterations, called the tabu search cutoff. The
interested reader may refer to the HEA presented in Cheng et al.
[6] for more details.
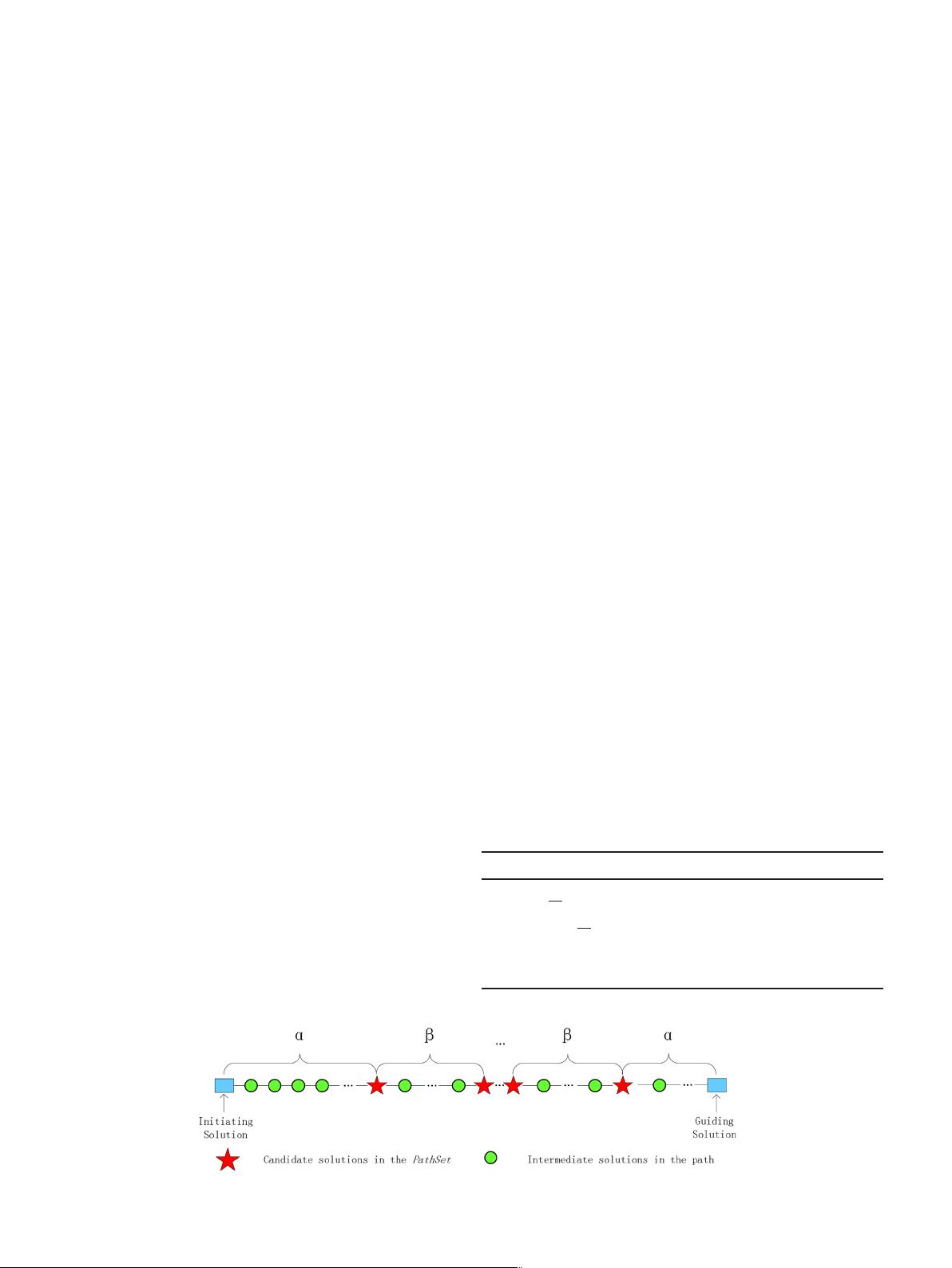
2.4. Path relinking procedure
The relinking procedure is used to generate new solutions by
exploring trajectories (confined to the neighborhood space) that
connect high-quality solutions. The solution that begins the path is
called the initiating solution while the solution that the path leads
to is called the guiding solution. The PathSet is a list of candidate
solutions that stores all the solutions generated during the path
relinking procedure. After the relinking procedure, a so-called
reference solution is chosen from the PathSet that serves to update
the population. In order to better describe the relinking procedure,
we give some definitions in Table 1.
Contrary to previous studies, our proposed path relinking
process mainly integrates two complementary key components
to ensure search efficiency. The first component is the construction
approach used for establishing the path between the initiating and
the guiding solutions. In the related literature, Nasiri and Kianfar
[13]'s relinking swaps adjacent operations on a machine, while
GRASP/PR by Aiex et al. [2] swaps different operations on each
machine in turn. However, in this study we swap two different
operations on one machine randomly, where both the operations
and the corresponding machine are randomly chosen. More details
will be presented in Section 2. The second component is the
method used to choose the reference solution. In related studies,
Aiex et al. [2] simply consider the solution with the best makespan
in the path as the reference one, while Nasiri and Kianfar [13]
follow Nowicki and Smutnicki [15]'s i-TSAB whereby it goes from
the initiating solution, then stops at a specific iteration and returns
the current solution as the reference solution. In contrast, we
devise a dedicated strategy based on the adaptive distance-control
mechanism to obtain the most promising solution. Therefore, the
path relinking approach plays the important role of diversification
in coordinating with the efficient TS procedure.
Fig. 2. Illustration of the path solution selection procedure.
Table 2
The settings of some important parameters in TS/PR.
Parameter Value Description
α
dis
5
Minimum distance between solutions in PathSet and
S
I
and S
G
β
max
dis
10
; 2
Interval for choosing the path solutions
si 500 The number of iterations for the slight tabu search
li 12,500 The number of iterations for the strong tabu search
p 30 Population size
B. Peng et al. / Computers & Operations Research 53 (2015) 154–164156
剩余10页未读,继续阅读
505 浏览量
2022-08-03 上传
2024-10-26 上传
2024-10-26 上传
266 浏览量
722 浏览量
205 浏览量
点击了解资源详情
点击了解资源详情

weixin_38745859
- 粉丝: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入解析ASP.NET底层架构:Web请求的流转与处理
- UML中文版:Java程序员指南
- Jboss EJB3.0 实战教程:从入门到精通
- 提升IE技巧:智能ABC与加密文件实用操作
- Windows CE.NET入门教程:配置与调试
- C++编程提升技巧:专家Scott Meyers作品精华解读
- 林锐博士的《高质量C++/C编程指南》要点解析
- Eclipse实战指南:Java开发者入门宝典
- VxWorks文件压缩与硬盘加载优化
- JSP数据库开发全攻略:Oracle集成与实战指南
- JBuilder9中构建Struts应用实战教程
- VxWorks下BSD4.4规范网络程序设计详解
- Struts框架详解:构建高效Web应用
- Velocity模板引擎:Java中的强大工具
- 智能奥秘:无机生命体的创建与智能原理探索
- C++在嵌入式系统中的关键技术与应用深度探讨
