移动机器人室内场景认知:激光与视觉融合技术
版权申诉
140 浏览量
更新于2024-06-22
收藏 4.95MB DOC 举报
"本文主要探讨了硕士研究生级别的移动机器人研究,重点关注如何通过三维激光测距与单目视觉技术实现室内场景的认知。"
在当前的机器人领域,环境感知与认知是实现自主导航和决策的重要环节。激光传感器,特别是三维激光测距仪,因其抗干扰性强和对光照条件不敏感的特性,成为了获取空间几何信息的理想工具。它能够提供精确的三维点云数据,帮助机器人理解周围环境的结构。另一方面,视觉传感器,如单目相机,虽然在深度信息获取上存在局限,但能提供丰富的色彩和纹理信息,对于场景的理解同样不可或缺。
文章提出了一个结合激光测距与单目视觉的室内场景认知方法。首先,利用激光数据的线段特征和区域扩张算法,提取出室内场景的结构化特征,如地面和墙壁等平面。这一过程有助于构建室内环境的基本框架,为后续的物体识别奠定基础。接着,针对非结构化的物体,文章提出了一种基于点云连续性的分割算法,以处理形状不确定和不规则的物体。
在场景认知中,Markov随机场(MRF)模型被广泛应用。本文采用MAP-MRF(最大后验概率-马尔科夫随机场)框架,将识别出的场景框架元素和物体作为节点,通过邻域关系来描述它们之间的交互,进一步提升物体认知的准确性。作者创新性地选择了物体的高度信息作为基本特征,并引入形状直方图来描述物体的三维形状,弥补了激光数据在形状表达上的不足。同时,通过融合单目视觉信息,尤其是在HSI颜色空间下构建物体的颜色直方图,为物体的识别提供了颜色维度的参考。
最后,通过上述认知结果,机器人能够构建具有语义信息的室内地图,即语义地图,这对于实现高级别的导航和环境理解至关重要。论文的实验部分验证了所提方法的有效性,证明了结合激光测距与单目视觉的室内场景认知策略在实际应用中的可行性。
关键词:三维激光测距,数据融合,MAP-MRF,场景认知,语义地图

高,则表示物体认知的结果越准确,认知的结果可信度越高。这可以有效的帮助机器人
根据不同的置信度对不同的物体做出不同的决策。
2 三维环境信息的获取及数据处理
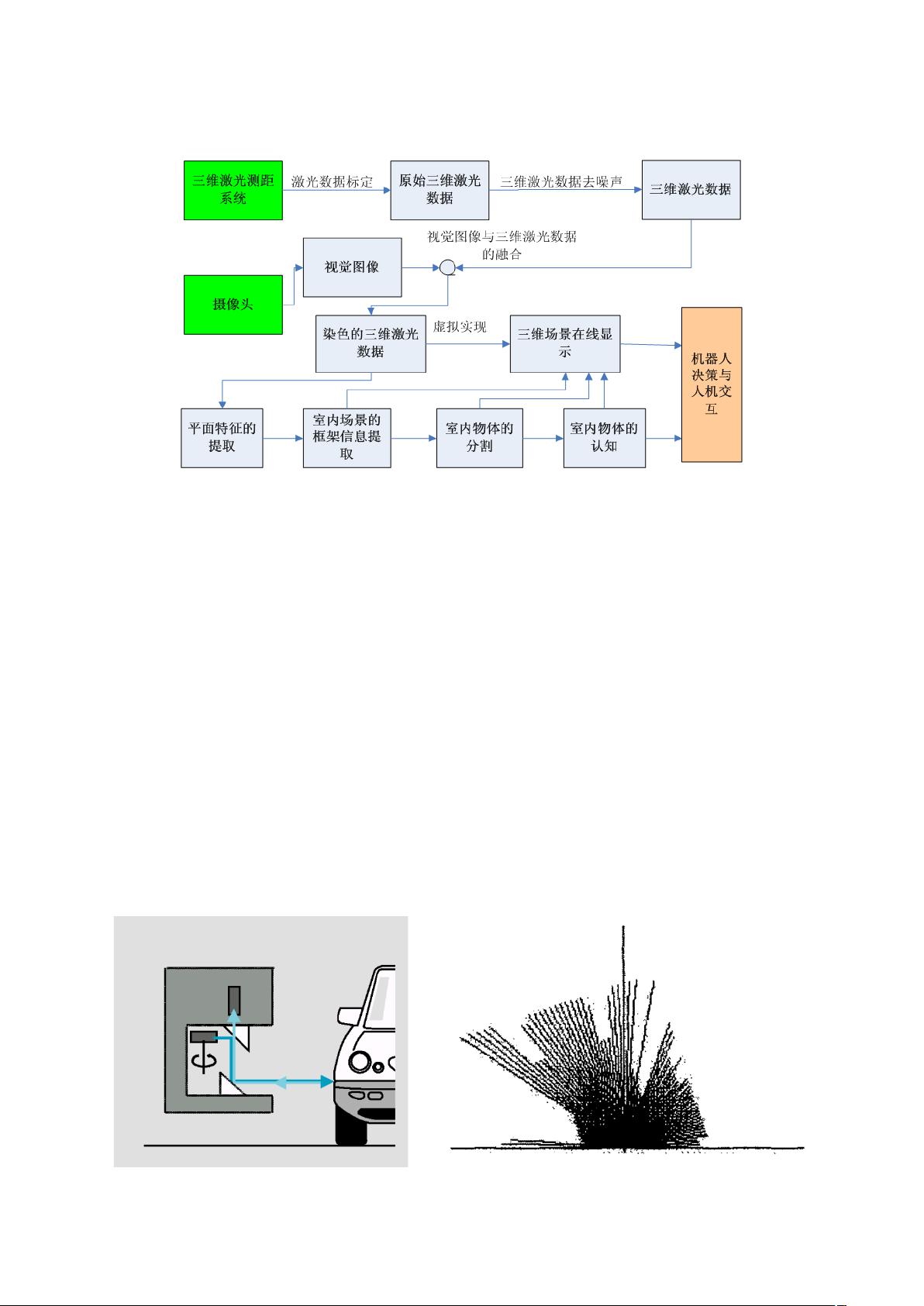
本文移动机器人认知系统的框架图如图 2.1 所示。首先,激光传感器可以获取场景
的三维激光数据。由于获取的数据仅仅是一个距离值,这需要通过硬件标定的方法将其
转化成三维空间坐标,这个将在后面讲到。另外激光数据采集的过程中会产生失败的数
据,比如发射的脉冲信号没有得到回收,这样的噪声数据需要使用程序对他们进行过滤,
比如将他们统一转化成原点坐标。与此同时,安装在激光上面的摄像头可以获取当前场
景的视觉图像,使用摄像头和激光标定的方法,可以确定图像和激光数据的位置关系,
实现图像和激光数据的融合。在本文中,融合有图像信息的激光数据即是实现室内场景
认知的数据源。
剩余51页未读,继续阅读
2019-08-17 上传
点击了解资源详情
2024-05-30 上传
366 浏览量
点击了解资源详情
点击了解资源详情

老帽爬新坡
- 粉丝: 95
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握JSON:开源项目解读与使用
- Ruby嵌入V8:在Ruby中直接运行JavaScript代码
- ThinkErcise: 20项大脑训练练习增强记忆与专注力
- 深入解析COVID-19疫情对HTML领域的影响
- 实时体育更新管理应用程序:livegame
- APPRADIO PRO:跨平台内容创作的CRX插件
- Spring Boot数据库集成与用户代理分析工具
- DNIF简易安装程序快速入门指南
- ActiveMQ AMQP客户端库版本1.8.1功能与测试
- 基于UVM 1.1的I2C Wishbone主设备实现指南
- Node.js + Express + MySQL项目教程:测试数据库连接
- tumbasUpk在线商店应用的UPK技术与汉港打码机结合
- 掌握可控金字塔分解与STSIM图像指标技术
- 浏览器插件:QR码与短链接即时转换工具
- Vercel部署GraphQL服务的实践指南
- 使用jsInclude动态加载JavaScript文件的方法与实践
