SIFT算法详解:尺度不变特征提取
需积分: 9 128 浏览量
更新于2024-07-25
收藏 2.9MB PDF 举报
"SIFT算法详解——一种尺度不变特征变换匹配算法"
SIFT(尺度不变特征变换)算法是一种经典的计算机视觉中的特征检测与描述方法,由加拿大的David G. Lowe教授在1999年提出,并在2004年进行了完善。这个算法的设计目的是解决图像在不同尺度、角度、光照条件下的匹配问题,从而实现图像间的稳健对应。SIFT特征不仅具有平移、缩放和旋转不变性,还能一定程度上抵抗光照变化、仿射变换和投影变换的影响。
1. SIFT算法的基本流程:
- **尺度空间极值检测**:首先通过高斯差分金字塔构建尺度空间,寻找稳定的局部最大值点,这些点被认为是潜在的关键点。
- **关键点定位**:精确计算每个候选关键点的位置,消除边缘响应,确保关键点的稳定性。
- **关键点定向**:为每个关键点分配一个主方向,使其对旋转具有不变性,通常通过检测梯度方向的分布来实现。
- **关键点描述符生成**:在关键点周围采样像素,形成一个描述符向量,这个向量对小的几何变形和光照变化具有不变性。
- **描述符量化与匹配**:最后,使用距离度量(如欧氏距离)来比较不同图像的SIFT描述符,找到最佳匹配对。
2. SIFT算法的优势:
- **尺度不变性**:通过高斯差分金字塔处理,SIFT能在不同尺度下找到特征,适合处理大小不一的物体。
- **旋转不变性**:关键点的主方向使得特征不受图像旋转的影响。
- **光照不变性**:描述符设计时考虑了光照变化,能适应光照强度的变化。
- **局部特性**:SIFT特征是局部的,只依赖于关键点周围的图像信息,不受全局图像内容影响。
- **鲁棒性**:即使在复杂的环境条件下,SIFT也能提供稳定的特征匹配结果。
3. SIFT算法的应用领域:
- **图像匹配**:在图像拼接、全景图创建、3D重建等领域,SIFT是常用的关键点匹配工具。
- **物体识别**:SIFT可以用于识别特定物体,即使物体的形状、尺寸或位置有所变化。
- **视频分析**:在视频追踪和行为识别中,SIFT帮助跟踪对象的运动轨迹。
- **机器人导航**:在机器人视觉系统中,SIFT有助于实现环境感知和定位。
4. SIFT算法的扩展与改进:
- **SURF**(加速稳健特征):比SIFT更快,但牺牲了一定的不变性。
- **ORB**(Oriented FAST and Rotated BRIEF):快速且适用于实时应用,结合了FAST关键点检测和BRIEF描述符。
- **BRISK**、**AKAZE**等其他算法:在效率和性能上做了进一步优化,以适应现代计算机视觉的需求。
尽管SIFT在许多应用中表现出色,但它也有一些局限性,比如计算复杂度较高、对大规模场景的处理效率较低等。因此,后续的研究工作主要集中在提高特征检测的速度、减少计算资源消耗以及增强在复杂环境下的性能。
Scale Invariant Feature Transform
SIFT
2012/3/27 12
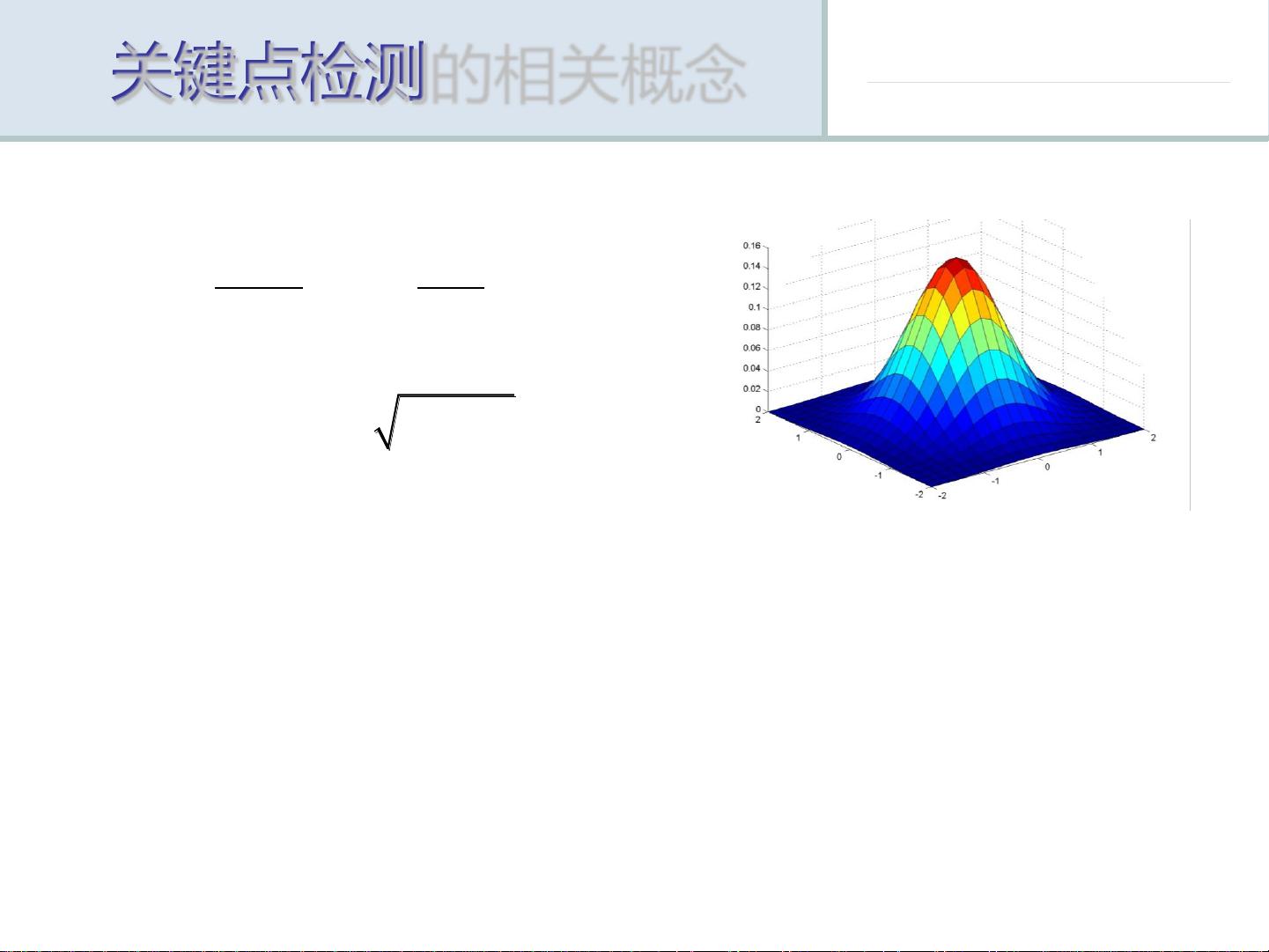
根据文献《Scale-space theory: A basic tool for analysing
structures at different scales》我们可知,高斯核是唯一可以产生
多尺度空间的核,一个图像的尺度空间,L(x,y,σ) ,定义为原始图像
I(x,y)与一个可变尺度的2维高斯函数G(x,y,σ) 卷积运算。
关键点检测
, , , , * ,L x y G x y I x y
22
22
1 ( ) ( )
, , exp
22
ii
ii
x x y y
G x y
高斯函数
尺度是自然存在的,不是人为创造的!高斯卷
积只是表现尺度空间的一种形式…
关键点检测的相关概念
剩余68页未读,继续阅读
2023-06-05 上传
2023-07-15 上传
2023-12-27 上传
2023-04-05 上传
2024-01-12 上传
2023-04-30 上传

Inverse.me
- 粉丝: 35
- 资源: 108
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
