构建CAN与TTCAN桥梁:MultiCAN模块详解
需积分: 9 133 浏览量
更新于2024-08-05
收藏 147KB PDF 举报
MultiCAN是Infineon Technologies推出的一款创新性的CAN模块,旨在连接TTCAN Level 1 & 2(Time-Triggered Communication for Automated Network, 自动化网络的时触发通信)与传统的CAN网络。这款模块的主要目标是提供一个高效且兼容的解决方案,以增强系统的灵活性和诊断能力。
首先,MultiCAN设计的关键特性包括一个内置的调度器,它能够在系统内部实现高级功能。这使得模块能够更好地管理节点间的通信,确保高效的时间同步和任务执行。此外,它的改进列表功能允许更精确的数据管理和传输,提高了数据处理的可靠性和效率。
硬件层面,MultiCAN作为一款硬件网关,提供了对不同CAN标准的支持,包括CAN 2.0b的全面兼容,以及对TTCAN Level 1 & 2的特定硬件支持。这使得用户可以根据实际应用需求灵活配置节点,满足不同的实时性要求和通信需求。
在消息对象管理方面,MultiCAN支持高达256个共享消息对象,对于四个独立的CAN 2.0b节点,每个节点拥有128个完全符合标准的消息对象,而专门用于TTCAN Level 1 & 2的节点则提供了额外的性能优化。这种设计允许用户在需要的时候利用TTCAN的时序精确性,同时保持与其他CAN节点的兼容性。
对比现有的TwinCAN实现,MultiCAN在功能、性能和可扩展性上有所提升。通过对比分析,文章详细展示了MultiCAN在系统构建和特殊情况下(如信息仅在特定时间窗口可用时)如何使用其替代消息功能,以适应不同场景的需求。
MultiCAN不仅是一个技术上的进步,也是Infineon向CAN领域推出的一个强大工具,它为工业自动化和控制应用提供了更高级别的通信解决方案,有助于提高系统的复杂度管理和实时通信效率。通过集成TTCAN的特性,MultiCAN为工程师们提供了一种灵活且强大的平台,可以应对各种挑战,推动未来工业4.0和智能工厂的发展。
iCC 2003 CAN in Automation
03-1
MultiCAN – a step to CAN and TTCAN
Ursula Kelling, Infineon Technologies
MultiCAN is a new CAN module, which is building up a bridge between TTCAN level 1
& 2 and normal CAN network. On one hand it has advanced features to mould the
system matrix within the build-in scheduler on the other hand it has an improved list
feature, a hardware gateway and additional features for CAN diagnostics. This paper
compares and shows the improvement between the TwinCAN implementation and the
new MultiCAN implementation. Finally it shows how to build up the system matrix and
how to use the alternative message, in case the information for exclusive time
windows is not ready.
MultiCAN – An Introduction
MultiCAN is a new scalable module, which
will become the new Infineon family CAN.
This module supports from one, up to
eight CAN nodes, with one of them fully
hardware supporting TTCAN (level 1 & 2).
The number of message objects can be up
to 256 message objects, shared for all
nodes. The current implementation
supports four independent nodes with 128
message objects fully CAN 2.0b compliant
and one node TTCAN level 1 and 2
compliant. All nodes support an analyzer
feature, which allows to connect to the bus
system as a passive member of the bus.
Message objects can be concatenated
form of a FIFO or to a hardware supported
gateway.
Message
Object
Buffer
128
Message
Objects
Message
Object
Buffer
128
Message
Objects
Linked List
Control
CAN Node
3
CAN Node
2
CAN Node
1
CAN Node
0
CAN Control
Time Triggered Extension
Timing Control and Synchronization
Scheduler
Schedule Timing Data Memory
MultiCAN Module Kernel
Clock
Control
Address
Decoder
Interrupt
Control
f
CAN
f
OSC
TXDC3
RXDC3
TXDC3
RXDC3
ECTT[7..1]
INT_O
[15..0]
Port
Control
TXDC1
RXDC1
TXDC2
RXDC2
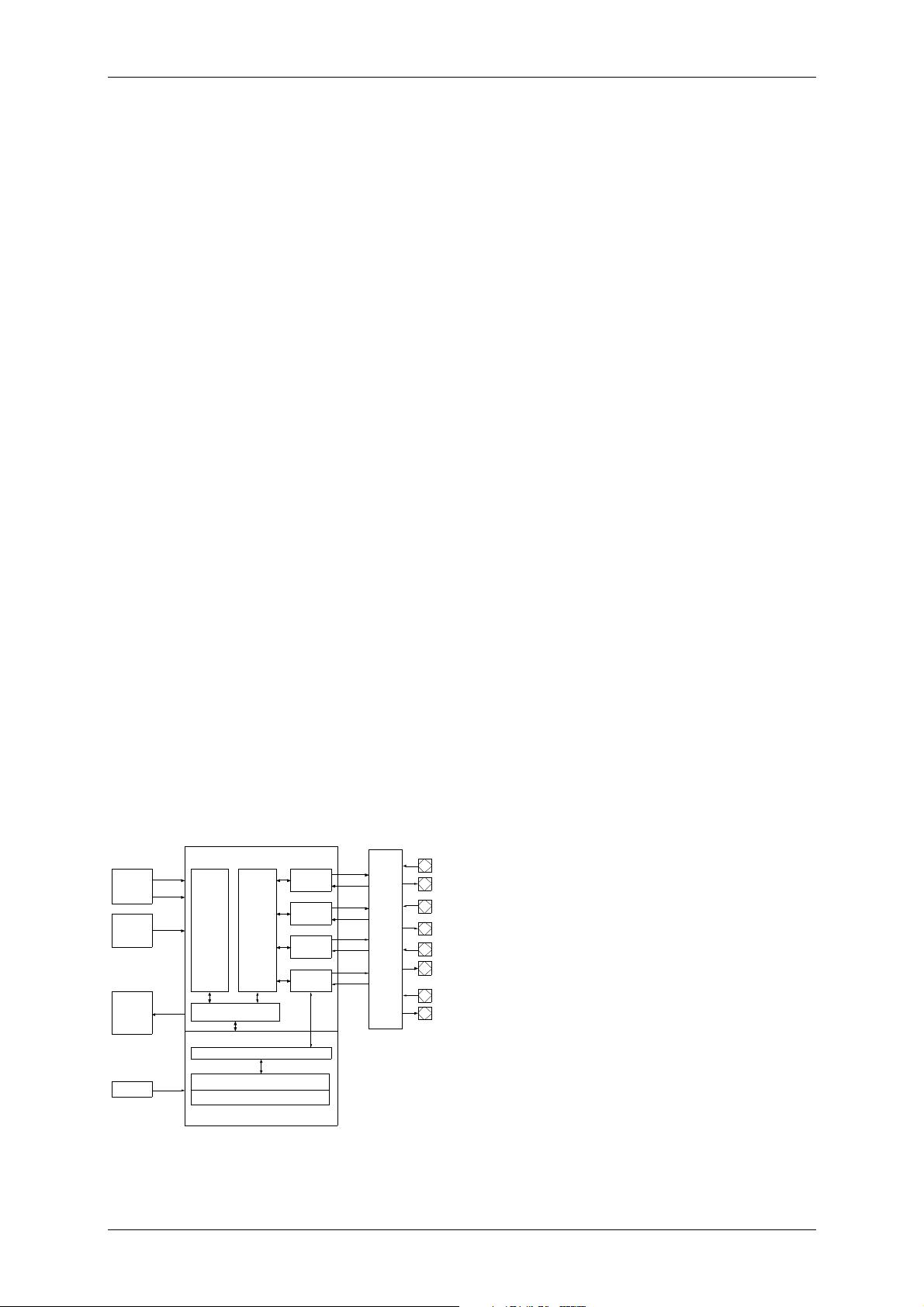
Figure 1: Overview of the MultiCAN Module
with Time-Triggered Extension
TTCAN and CAN nodes
All nodes support CAN, but one node
additionally supports TTCAN level 1 and 2
by hardware. This node offers a built in
scheduler to support the system matrix.
For each message object 'connected' to
the TTCAN system, an emergency
message (alternative message) is
supported. The alternative message can
be sent, if in an exclusive time window the
information for this time window is not
ready. Additionally to these features,
global timing is available and a timing
related interrupt, which can wake up the
system, e.g. out of the gap mode.
Differences: TwinCAN – MultiCAN
MultiCAN as a successor of TwinCAN,
gives advanced features. On TwinCAN
only two nodes were possible. Now more
nodes are supported as before a shared
message object memory part are possible
to give a flexible environment. To provide
the flexibility in terms of number of
message objects per node, a single bit
had to be set, to provide the node
information. Now, having more nodes and
additionally double chained lists a bitfield
became necessary. The list (node)
information can be found in every
message object, to give a decision
parameter for the CAN controller and an
overview of the actual position of every
message object for the user. In Figure 2
an example for this list – node connection
is given.
下载后可阅读完整内容,剩余5页未读,立即下载
2023-03-11 上传
2024-10-23 上传

jiankangshiye
- 粉丝: 72
- 资源: 109
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握Jive for Android SDK:示例应用的使用指南
- Python中的贝叶斯建模与概率编程指南
- 自动化NBA球员统计分析与电子邮件报告工具
- 下载安卓购物经理带源代码完整项目
- 图片压缩包中的内容解密
- C++基础教程视频-数据类型与运算符详解
- 探索Java中的曼德布罗图形绘制
- VTK9.3.0 64位SDK包发布,图像处理开发利器
- 自导向运载平台的行业设计方案解读
- 自定义 Datadog 代理检查:Python 实现与应用
- 基于Python实现的商品推荐系统源码与项目说明
- PMing繁体版字体下载,设计师必备素材
- 软件工程餐厅项目存储库:Java语言实践
- 康佳LED55R6000U电视机固件升级指南
- Sublime Text状态栏插件:ShowOpenFiles功能详解
- 一站式部署thinksns社交系统,小白轻松上手
