




视觉导航机器人设计:基于能力风暴与无线通信
PDF格式 | 343KB |
更新于2024-08-29
| 6 浏览量 | 举报
"本文介绍了在工业电子领域中设计的一种视觉导航机器人的实现方法,该机器人结合了视觉模块和无线通信技术,以实现自主路径跟踪。设计的核心在于提高系统的实时性和鲁棒性,确保在图像预处理、路径识别和路径跟踪等关键步骤中的高效稳定。系统结构包括具备无线通信和视觉功能的能力风暴机器人以及远程计算机,两者通过无线通信模块交换信息。软件流程则分为机器人端的指令处理和计算机端的视觉导航软件,形成一个闭环控制系统。"
在工业电子中,视觉导航机器人的设计是提升自动化水平和智能化程度的重要途径。机器视觉系统作为智能机器人的重要组成部分,它模仿人类视觉,使机器人能够非接触地感知周围环境,增强其自主性和适应性。当前,常见的机器视觉系统采用封装式图像处理,将图像传感与处理分离,由图像传感器捕获图像,然后由计算机进行图像分析。
本文详细阐述了为能力风暴机器人添加视觉模块和无线通信模块的过程,这使得机器人能够接收并处理来自远程计算机的指令,实现自主路径跟踪。在设计中,特别强调了算法的实时性和鲁棒性,确保在图像预处理阶段能快速有效地去除噪声,提升图像质量;在路径识别阶段能准确识别目标路径;在路径跟踪阶段,即使面对环境变化或干扰,也能稳定地保持对预设路径的追踪。
系统架构上,机器人部分包括能力风暴机器人主体、无线摄像头以及无线通信模块。无线摄像头捕获的视频信号通过无线传输至远程计算机,视频信号经过Osprey210采集卡处理后,计算机根据处理结果生成控制指令,再通过无线通信模块回传给机器人。无线通信模块采用全双工模式,保证数据双向同步传输。
软件层面,系统软件分为两大部分:一是机器人接收到计算机指令后的执行程序,主要负责解析指令并控制机器人行动;二是运行在计算机上的视觉导航软件,处理来自机器人的视频信号,进行路径识别和决策。这种软件设计形成了一个反馈控制环,确保了机器人的行为与计算机指令的精确匹配。
这个视觉导航机器人的设计结合了硬件升级和软件优化,旨在实现更高级别的自主导航和动态环境适应,为工业电子领域带来了更高效的自动化解决方案。通过不断优化算法和提高通信效率,未来有望在更多复杂的工业应用场景中看到这类机器人的广泛应用。
工业电子中的一种视觉导航机器人的设计工业电子中的一种视觉导航机器人的设计
0 引言 机器视觉系统是智能机器人的重要标志,机器人视觉系统模仿了人的视觉感知能力,允许对环境做
非接触式的测量。增加了视觉系统的机器人,其自主和自适应能力可以大大提高。目前,机器视觉系统在图像
处理方面多采用封装式图像处理方法,把图像传感与处理分成独立的两个部分。系统通过图像传感器获取图像
并传入计算机,由计算机完成图像处理任务。 本文所介绍的设计为简易机器人(能力风暴机器人)添加了视
觉模块和无线通信模块,并研究了相关算法和策略,实现了自主路径跟踪。为了使系统真正做到稳定快速,在
图像预处理、路径识别和路径跟踪等各个环节都充分考虑到算法的实时性与鲁棒性。 1 系统结构 视觉
导
0 引言
机器视觉系统是智能机器人的重要标志,机器人视觉系统模仿了人的视觉感知能力,允许对环境做非接触式的测量。增加
了视觉系统的机器人,其自主和自适应能力可以大大提高。目前,机器视觉系统在图像处理方面多采用封装式图像处理方法,
把图像传感与处理分成独立的两个部分。系统通过图像传感器获取图像并传入计算机,由计算机完成图像处理任务。
本文所介绍的设计为简易机器人(能力风暴机器人)添加了视觉模块和无线通信模块,并研究了相关算法和策略,实现了自
主路径跟踪。为了使系统真正做到稳定快速,在图像预处理、路径识别和路径跟踪等各个环节都充分考虑到算法的实时性与鲁
棒性。
1 系统结构
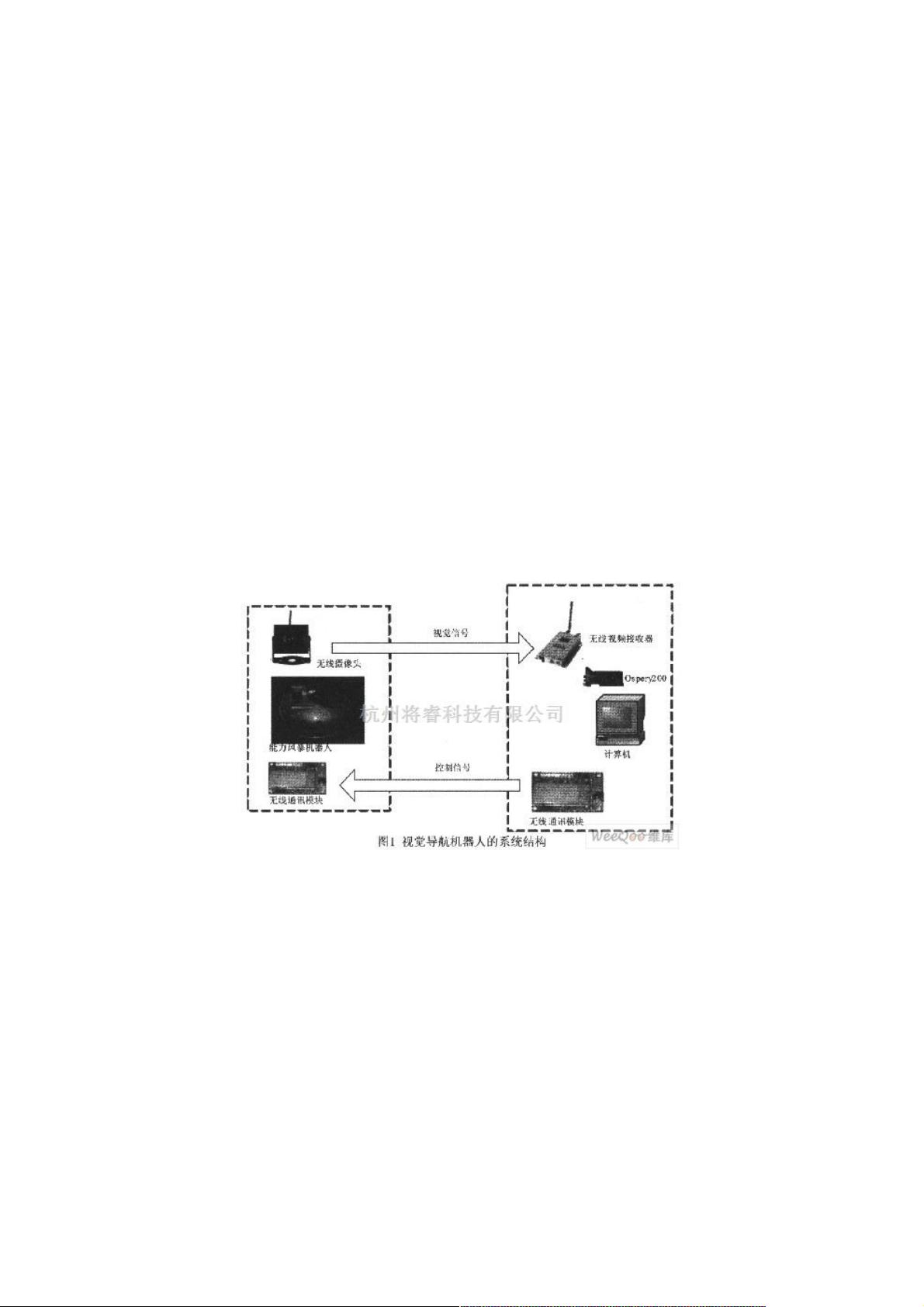
视觉导航机器人的整个系统由两部分构成:添加了无线通信模块和无线摄像头的能力风暴机器人和远程计算机。这两部分
之间的通信由无线通信模块完成。系统结构如图1所示。图1中,机器人包括能力风暴机器人、无线摄像头和无线通信模块三
个部分。在机器人工作时,无线摄像头将采集到的视频信号传送给无线视频接收器,无线视频接收器再通过视频采集卡
(Osprey210)将待处理的视频信号传送给计算机,计算机经过处理后,做出相应的决策,并将决策信号通过无线通信模块发送
给机器人,这样就建立了一个简单的闭环控制系统。无线通信模块由两个完全相同的无线串口通信模块组成,工作在全双工状
态。在机器人中无线通信模块与机器人的串口控制器连接,在计算机中无线通信模块与计算机的COM口相连。
2 软件流程
整个系统的软件分为机器人接收到远程计算机指令后的处理软件和远程计算机针对到机器人发来视频信号进行处理的视觉
导航软件。
机器人的软件处理流程如图2所示。机器人不停地扫描串口,一旦串口接收到远程计算机的指令信号后,机器人便根据指
令做出响应,整个处理过程比较简单。
下载后可阅读完整内容,剩余5页未读,立即下载
相关推荐
123 浏览量
145 浏览量
142 浏览量
2021-08-14 上传
2021-09-12 上传
126 浏览量
点击了解资源详情
103 浏览量
点击了解资源详情

weixin_38514526
- 粉丝: 7
 我的内容管理
展开
我的内容管理
展开








最新资源
- HTML压缩文件恢复工具的核心实现
- LaTeX设计与ImageMagick转换的JFSS CS俱乐部徽标
- 商业版多用户域名隐藏转发系统发布
- JavaScript基础学习指南
- GECOS控制中心UI界面发布与管理
- 小型休闲农庄系统的设计与实现
- 深入解析数据集的重要性及应用场景
- PL2303 USB转串口驱动程序安装与使用指南
- Python实现FireEye Agent远程安装及SSH/SFTP文件管理
- 使用wbm提取输入域的全部Wayback Machine存档链接
- AerospikeDB数据浏览器:桌面应用实现数据探索与ANSI SQL查询
- Webpack入门及MDB UI套件快速安装指南
- 小型涡喷发动机燃油调节器技术资料解析
- Flatle克隆项目:React Redux投资组合实践教程
- React-Native在世博会中的应用:深入探讨定积分与级数收敛性问题
- TypeScript前端开发实践指南






















