SCaNME:利用未标记移动地图的校园Wi-Fi定位系统
需积分: 9 17 浏览量
更新于2024-07-09
收藏 4.06MB PDF 举报
SCaNME(Shotgun Clustering-aided Navigation in Mobile Environment)是一项针对大型校园Wi-Fi环境的创新位置追踪系统。该研究论文关注于利用未标记的移动地图技术来提高定位精度,尤其是在无线信号强度(Received Signal Strength, RSS)数据稀疏且不连续的情况下。论文的核心贡献在于提出了一种迭代的集群化方法,通过整合偶然记录的RSS测量值,系统能够动态地构建和更新环境的移动地图。
首先,系统的关键组成部分是基于"Shotgun Reads"的概念,这暗示了系统能够在短时间内收集大量RSS样本,即使信号不稳定或信噪比低也能捕捉到环境中的基本信息。这些数据被用于构建一个初始的粗粒度地图,代表了Wi-Fi热点的分布和可能的位置区域。
其次,论文采用" Spectral Clustering"算法对这些RSS数据进行聚类分析。Spectral Clustering是一种基于图论的聚类方法,它利用数据的相似性度量(如Kullback-Leibler divergence,KL散度)来发现数据的内在结构,从而将空间上相邻的热点连接起来,形成潜在的移动路径。
接着,系统利用Allen’s Logic(一种逻辑推理框架)来优化和调整聚类结果。Allen’s Logic有助于处理动态变化的Wi-Fi环境,确保位置跟踪的准确性和实时性。通过不断迭代,SCaNME能够适应环境的变化,比如新的Wi-Fi接入点的出现或原有热点的消失,从而持续更新和改进其移动地图。
最后,SCaNME的核心优势在于其自适应性和鲁棒性。即使在没有预先标记的环境地图或移动设备精确定位信息的情况下,通过对无线信号的密集采样和智能分析,仍然能够提供相对准确的位置估计,这对于大规模的校园Wi-Fi环境尤其重要,因为这些环境通常信号复杂、用户移动快速且难以获取全面的地理信息。
SCaNME是一项具有实际应用价值的研究成果,它不仅提高了Wi-Fi环境下位置跟踪的效率,而且展示了如何利用无线信号的非连续性和不确定性来构建动态的地图模型,对于无线通信技术领域以及未来的移动定位服务具有重要的理论和实践意义。
considered to improve the location certainty and the incomplete
signal processing capability. MMLP consists of five key modules
including the RSS recording and smoothing, data normalization,
perceptron training, data post processing, and position estimation.
Fang studied the discriminant-adaptive neural network (DANN)
based location tracking (Fang & Lin, 2008). Compared to MMLP,
DANN compresses the raw RSS data into a low dimensional space,
and then extracts the most beneficial discriminative components
to train a reliable location tracking system. A comprehensive com-
parison between pattern matching and decision tree (DT) for the
location tracking are discussed in Badawy and Hasan (2007).InBa-
dawy and Hasan (2007), the DT performs better than the pattern
matching in location accuracy because the inappropriate number
and structures of neurons could seriously deteriorate the accuracy
of pattern matching based location tracking systems.
2.2. Propagation model-based location tracking
The propagation model in Emery and Denko (2007), Alasti et al.
(2009) shows that the mean of received RSSs decreases logarithmi-
cally with the propagation distance in open environment. How-
ever, in the indoor environment, if the path loss exponents are
assigned inappropriately or the small-scale fading dominants over
the large-scale fading, the propagation model based location track-
ing system cannot be effective. In Ahn and Yu (2008), Ahn and Yu
investigated the combination of Wi-Fi, UWB, and ZigBee technolo-
gies to achieve the location tracking. In their system (Ahn & Yu,
2008), a finer radio propagation model was built up based on the
iterative calibration of the parameters for propagation models.
Narzullaev and coauthors in Narzullaev et al. (2008) compared
the reliability of one-slope, modified one-slope, and multi-wall
propagation models. The one-slope model is built upon the
assumption of log-distance path loss property. Compared to the
one-slope model, the modified one-slope model has the main
advantages of finer granularity of prediction points, as well as
the reduced sample collection time. Different from the one-slope
and modified one-slope models, the multi-wall model took into ac-
count the path loss caused by the walls and floors. More studies on
propagation model based location tracking systems in Wi-Fi envi-
ronments can be found in Widyawan et al. (2007), Liu et al. (2012),
Shen et al. (2011), Wang et al. (2005).
The above work offered a variety of technologies to facilitate the
location tracking by using the existing widespread Wi-Fi networks.
However, there are still two significant but open problems in this
area. One is about the dimension flood of RSS fingerprints caused
by the significantly increasing number of APs. To solve this prob-
lem, Fang and coauthors in Feng et al. (2010), Au et al. (2012)
developed a compressive sensing approach to recover the whole
sparse signals from a small number of RSS measurements. Another
drawback is about the laborious cost for the fingerprint calibration.
To avoid this laborious cost, we have introduced a novel adaptive
mobility map in Zhou et al. (2013), which can be used to track peo-
ple’s locations by shotgun read matching.
The SCaNME system proposed in this paper is distinct from the
above location tracking systems in three aspects. First, the SCaNME
relies on the spectral clustering to examine the similarities of RSS
samples in both the RSS and timestamps. After the spectral cluster-
ing, the RSS dimension flood can be avoided by using Laplacian
embedding-based dimensionality reduction. The Laplacian embed-
ding is featured with RSS locality-preserving property and RSS
clustering. Second, the SCaNME is built upon the unlabeled sam-
ples which have no explicit information about their physical coor-
dinates, so that the time and laboring cost for location
fingerprinting is not considered, and thereby the location tracking
process becomes flexible and reliable. Finally, the SCaNME takes
advantage of Allen’s logics to record the people’s activities in target
environment, thus it is capable of providing more accurate tracking
than the conventional location tracking systems.
2.3. Purpose of mobility map construction
As discussed in Zhou et al. (2013), we introduced a way to con-
struct an unlabeled mobility map in which the similar RSS samples
recorded within a small time interval and with small RSS differ-
ence can be clustered together to form a location point (LP). To
construct the mobility map, we first use Kullback–Leibler (KL)
divergence to examine the similarity of each pair of LPs, and then
assemble these LPs into a graph by using the time stamped transi-
tion relations among the LPs.
In our experiments, each person is equipped with a Samsung
GT19100 Android phone to record the Wi-Fi RSS measurements
following his or her activities in HKUST campus. Each measure-
ment consists of the time stamped RSS values and the associated
MAC addresses of hearable APs. In the off-line phase, the sporadi-
cally recorded measurements are used to construct an unlabeled
mobility map G =(V
C
, E
u
) in which the vertices C
e
V
C
and edges
u
e
E
u
represent the clusters of similar measurements and the
transition relations among the clusters, as discussed in Wang
et al. (2012). Based on the mobility map, the LPs involved in peo-
ple’s activities can be identified by using Allen’s logics. Then, in
the on-line phase, the location tracking is composed of four key
steps: (1) collection of new data; (2) selection of candidates; (3)
location tracking by the maximum likelihood estimation (MLE) cri-
terion; and (4) path reconstruction.
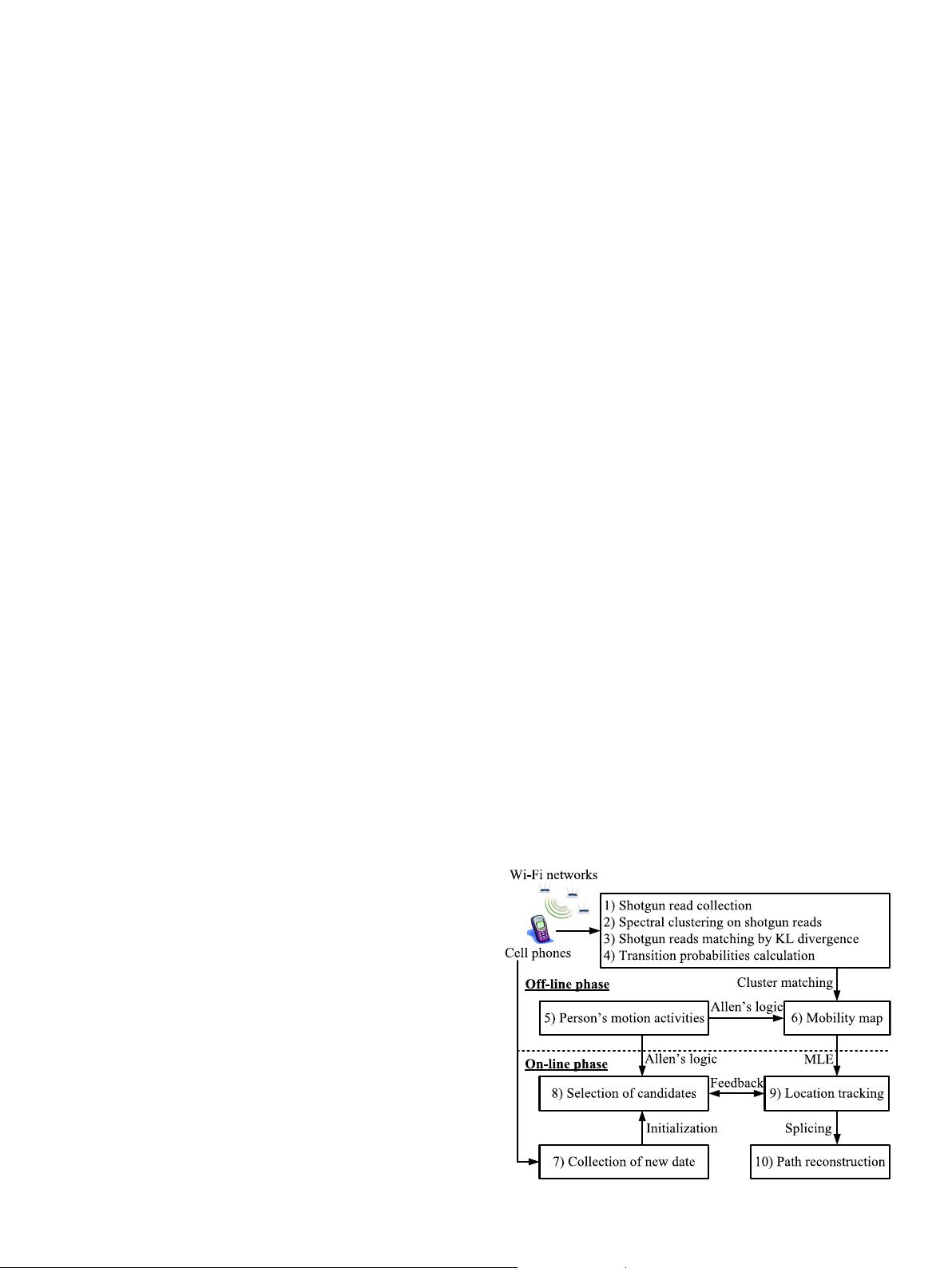
3. Architecture of SCaNME location tracking
There are two phases involved in SCaNME system, the off-line
mobility map construction phase and the on-line path reconstruc-
tion phase. An overview of our proposed SCaNME system is illus-
trated in Fig. 1. After the mobility map is constructed, we track
the people’s positions by matching the newly collected RSS data
into the pre-stored RSS samples. Details of each step in SCaNME
system are described below.
3.1. Review of mobility map construction
Mobility map construction consists of: (1) shotgun read collec-
tion; (2) spectral clustering on shotgun reads; (3) shotgun read
Fig. 1. Block diagram of SCaNME system.
M. Zhou et al. / Expert Systems with Applications 41 (2014) 3429–3443
3431
剩余14页未读,继续阅读
862 浏览量
796 浏览量
1269 浏览量
1227 浏览量
980 浏览量
1102 浏览量
2079 浏览量
2300 浏览量

weixin_38628830
- 粉丝: 3
- 资源: 954
 我的内容管理
展开
我的内容管理
展开







最新资源
- 实验6,c语言编程修改编译器源码,c语言
- 最漂亮的LED花朵,一朵永远盛开的机械郁金香-电路方案
- org.eclipse.jgit.pgm-3.2.0.0.2-UNOFFICIAL-ROBERTO-RELEASE.zip
- adminli
- 简单平衡车代码.zip
- furima-34554
- org.eclipse.jgit.pgm-3.2.0.0.2-UNOFFICIAL-ROBERTO-RELEASE.zip
- smartcat-serge-sync-plugin:Smartcat平台的持续本地化解决方案
- Adithya2008-C-29-pro-2
- 8.3 使用注册表-----
- 老外开发项目—STM32F429设计的mini示波器源代码共享-电路方案
- automatic_bicycle:自主自行车算法
- grib-rs:用于Rust的GRIB格式解析器
- ProjetoCalculadora:用JavaScript制作的简单计算器
- 基于HTML实现的儿童乐园蓝色可爱的小学网站模板5589(css+html+js+图样).zip
- sew 31c系列变频器说明 PPT.rar
