ABB机器人操作手册:IRC5与FlexPendant安全指南
需积分: 50 25 浏览量
更新于2024-07-17
1
收藏 14.41MB PDF 举报
操作员手册是针对ABB机器人的详细介绍文档,主要针对IRC5型号,特别是与FlexPendant配合使用的版本。这份手册由ABB公司于2004年至2007年期间发布,版权归ABB所有,强调了知识产权保护,并声明了手册内容可能会有所更新,但不另行通知,且不作为法律保证。
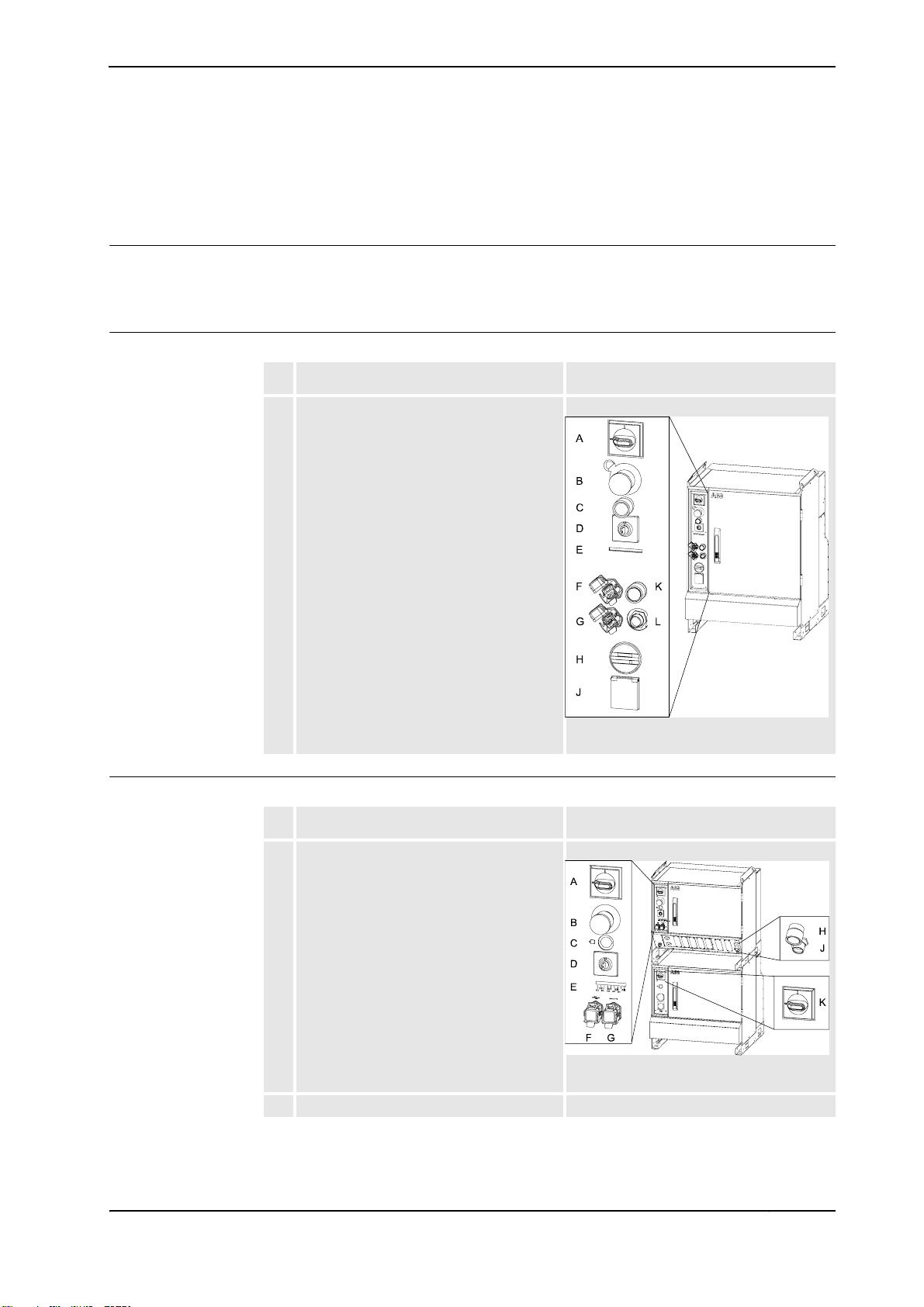
手册的核心内容包括安全指导,如操作员应遵守的安全标准、术语定义以及应对紧急情况的方法。首先,章节1详细阐述了安全原则,如确保总电源关闭以防止意外启动,移动机器人可能导致致命后果,以及操纵器轴制动闸的重要性。警告部分强调了机器人对静电的敏感性,以及紧急停止、安全停止和安全保护的区别。在紧急情况下,操作员需知道如何停止系统、释放制动闸、进行灭火,以及如何从紧急停止状态恢复并回到编程路径。
章节2则欢迎用户使用FlexPendant,它是一个关键的控制器,提供了与机器人交互的界面。这部分内容可能涵盖了FlexPendant的正确使用方法、安全注意事项以及不同操作模式下的安全性,如手动减速和全速模式,以及自动模式下的安全措施。工作中的安全事项被分为几个子类别,如自我保护、FlexPendant的处理、推荐的安全工具使用,以及在各种操作模式下保持安全的操作指南。
这份操作员手册是为确保操作人员能够理解和遵循ABB IRC5机器人及其FlexPendant的正确操作程序,减少潜在风险,提高工作效率。它强调了遵守制造商的规定和最佳实践,以保障操作人员的人身安全和设备完好。未经ABB的许可,任何复制、传播或非授权使用都会被视为侵权行为。
1 安全
1.2. IRC5 的应用安全标准
3HAC16590-10 米Ι : J14
© Copyright 2004-2007 ABB. 保留所有权利。
1.2. IRC5 的应用安全标准
健康和安全标准
机器人完全遵循 EEC 机器指令中规定的健康和安全标准。
IRC5 控制的 ABB 机器人符合以下标准:
标准 说明
EN ISO 12100-1 机械安全,术语
EN ISO 12100-2 机械安全,技术规范
EN 954-1 机械安全,控制系统的安全相关部件
EN 775 工业操作机器人,安全
EN 60204 工业机器电气设备
EN 61000-6-4 (可选) EMC,通用电磁辐射
EN 61000-6-2 EMC,通用抗电磁辐射
标准 说明
IEC 60204-1 工业机器电气设备
IEC 60529 外壳防护等级
标准 说明
ISO 10218 工业操作机器人,安全
ISO 9787 工业操作机器人,坐标系和动作
标准 说明
ANSI/RIA 15.06/1999 工业机器人和机器人系统的安全要求
ANSI/UL 1740-1998 (可
选)
机器人和机器人设备安全标准
CAN/CSA Z 434-03 (可
选)
工业机器人和机器人系统-通用安全要求

剩余333页未读,继续阅读
2023-05-14 上传
2021-10-14 上传
2020-05-06 上传
2022-11-01 上传
2023-03-21 上传
2019-05-23 上传
124 浏览量

leo235689
- 粉丝: 9
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM动力电池数据管理系统源码及数据库详解
- R语言桑基图绘制与SCI图输入文件代码分析
- Linux下Sakagari Hurricane翻译工作:cpktools的使用教程
- prettybench: 让 Go 基准测试结果更易读
- Python官方文档查询库,提升开发效率与时间节约
- 基于Django的Python就业系统毕设源码
- 高并发下的SpringBoot与Nginx+Redis会话共享解决方案
- 构建问答游戏:Node.js与Express.js实战教程
- MATLAB在旅行商问题中的应用与优化方法研究
- OMAPL138 DSP平台UPP接口编程实践
- 杰克逊维尔非营利地基工程的VMS项目介绍
- 宠物猫企业网站模板PHP源码下载
- 52简易计算器源码解析与下载指南
- 探索Node.js v6.2.1 - 事件驱动的高性能Web服务器环境
- 找回WinSCP密码的神器:winscppasswd工具介绍
- xctools:解析Xcode命令行工具输出的Ruby库
