MATLAB中PID控制器对小车速度控制的仿真研究
下载需积分: 1 | DOC格式 | 590KB |
更新于2024-09-20
| 141 浏览量 | 举报
“控制系统试验是一个利用MATLAB进行的教育性教程,着重讲解如何运用PID控制器进行系统控制。实验中,小车的运动学方程被建立,通过PID控制器调整以达到期望的速度性能指标。”
在这个控制试验教程中,核心知识点主要包括:
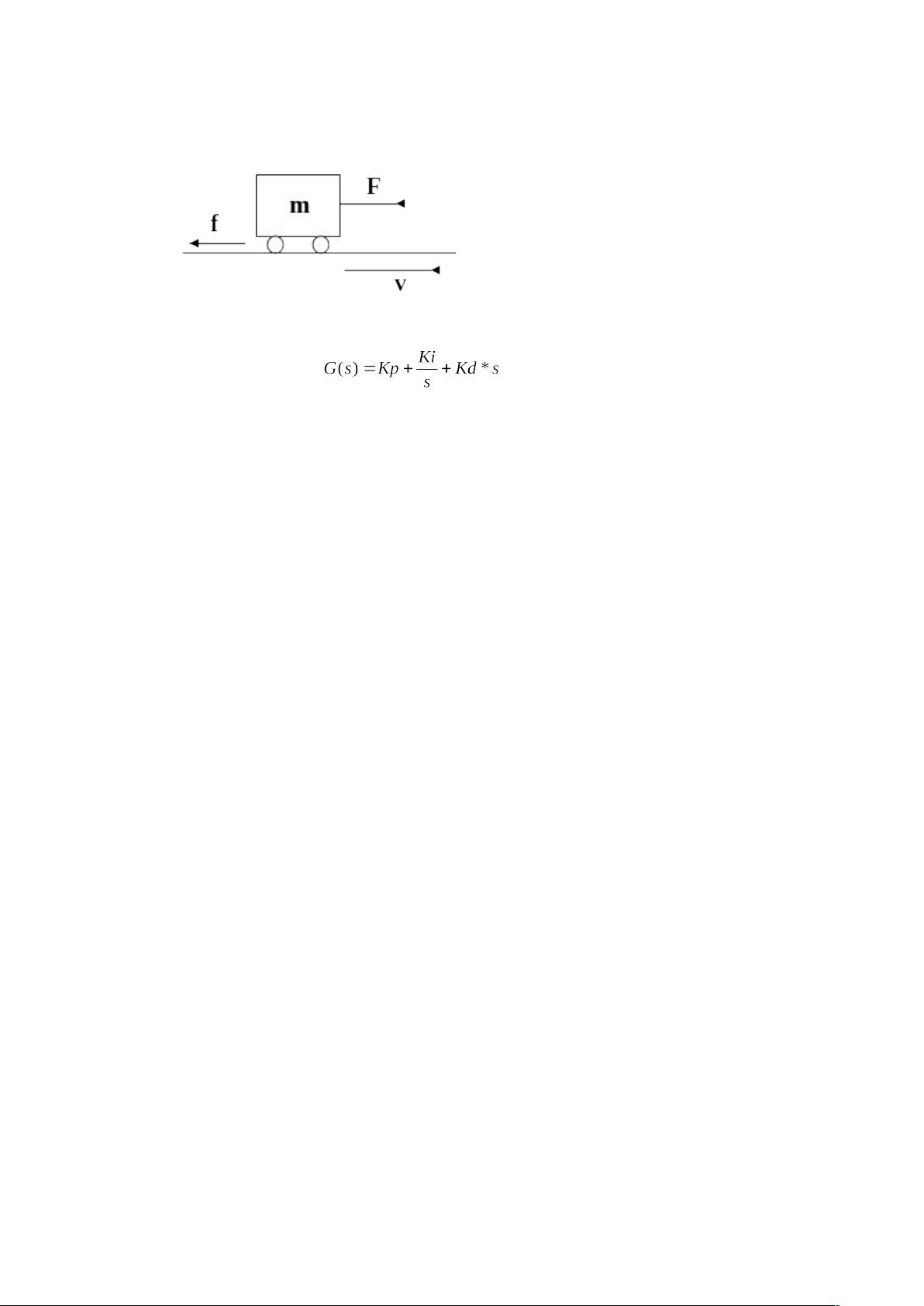
1. **运动学方程**:小车的运动学方程是分析控制系统的基础。在这个例子中,方程是 F = am - ff = b * v,其中 F 是作用力,am 是加速度,ff 是摩擦力,b 是阻尼系数,m 是小车质量,v 是速度。这个方程展示了外力如何影响小车的运动状态。
2. **PID控制器**:PID控制器是一种广泛应用的反馈控制系统,由比例(P)、积分(I)和微分(D)三个部分组成。它的传递函数在描述中没有具体给出,但通常形式为 Kp + Ki/s + Kd * s。在这个实验中,PID控制器用于调整小车的实际驱动力,以减小期望速度v与实际速度v(t)之间的误差。
3. **仿真要求**:
- **未添加PID控制器的仿真**:目的是观察在没有控制器的情况下,小车在500N力作用下的速度变化曲线,仿真时间为120s。
- **添加PID控制器的仿真**:需要调整PID控制器的Kp、Ki、Kd参数,使得在25s内,小车速度达到指定性能指标:上升时间小于5秒,超调量小于10%,稳态误差小于2%。
4. **MATLAB环境**:整个模型是使用MATLAB 6.5开发的,结合Simulink进行建模和仿真。模型文件和图形用户界面(GUI)文件共同构成了控制系统试验的完整框架。
5. **模型与仿真结果**:
- **无PID模型**:展示了小车在无控制情况下的速度响应。
- **有PID模型**:通过调整PID参数,实现了所要求的性能指标,包括快速上升、低超调和小的稳态误差。
- **用户界面**:提供了一个友好的菜单,允许用户切换不同仿真结果的显示,同时可以查看关键性能指标如上升时间、超调量和稳态误差。
6. **代码段**:这段代码示例说明了如何将仿真结果与GUI界面连接,显示仿真过程中小车的速度变化,并启用网格显示以更清晰地理解数据分布。
通过这个教程,学习者可以深入理解PID控制器的工作原理以及如何使用MATLAB和Simulink进行控制系统的设计和仿真,同时也掌握了评估和优化控制性能的关键指标。
一 .问题描述
运动学方程:
其中: 期望稳定速度:
控制器传递函数:
二 . 基本要求
未添加 控制器的小车速度仿真模型仿真该小车在 的力的作用
下的速度变化曲线,仿真时间 。
添 加 了 控 制 器 的 小 车 速 度 模 型 , 可 以 通 过 双 击 控 制 器 设 置
、、 三个参数,并达到规定的速度曲线的指标。 以期望的稳 定
速度 和当前速度 !"之间的误差信号经过 控制器后的信号作为
小车的实际驱动力,对小车速度曲线进行控制。达到下列指标: 仿真时间
"
上升时间:#$超调量:#% 稳态误差:#%
&小车速度仿真曲线之间的切换通过友好的菜单界面来实现,网格线开关,指
标的显示(上升时间超调量稳态误差)等。
三 . 运行环境
本模型使用 !'( 进行编程及仿真。其中用到两个模型文件和一个
)* 文件。使用 +', 与编程相结合的方式。
四 .功能简介
1. 未添加 PID 控制器的小车速度仿真模型
下载后可阅读完整内容,剩余4页未读,立即下载
相关推荐





acaibuaa
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Jabber与SOAP协议代理模型:实现与通信解决方案
- Jabber与SOAP协议代理模型实现与应用
- SOA服务生命周期:专业指南第三部分
- SOA参考架构解析:专业人员指南第二部分
- SOA专业指南:第一部分——揭示服务导向架构应用的核心原因
- 大学英语四级词汇解析与学习
- Hibernate中文教程:从入门到精通
- Apache JMeter性能测试实战指南
- VisualBasic6.0程序设计教程概览
- Ajax实战:革新Web设计,打造无缝体验
- 快速入门:使用JFC/Swing构建GUI
- 深入Linux编程:探索高级技术
- iBATIS开发指南:从入门到高级特性解析
- 广西思科认证培训中心:实战课程与实验指南
- 经典数据库系统学习指南:必读论文清单
- CISCO7609路由器配置指南:命令参考与12.1E版本特性
