ROS Winbox中文版教程:图形管理与双网口设置详解
版权申诉
163 浏览量
更新于2024-08-26
收藏 933KB PDF 举报
本篇文档是关于ROS (Robot Operating System) 的Winbox中文版使用教程整理。ROS 是一个开源的机器人操作系统,主要用于控制和管理复杂的机器人系统,通过其图形界面工具Winbox,用户可以方便地进行设备配置和网络管理。Winbox 提供了一种直观的方式来操控网络设置,特别是对于多网口路由器的管理。
首先,文档强调了在使用Winbox图形管理前,需要确保本地计算机上的网络接口被正确设置。这包括检查网卡的状态,如在Windows环境下,用户可以通过"Interfaces"菜单查看网卡的连接状况和流量。此外,文档还指导如何查看WAN口(广域网接口)的详细信息,这对于远程访问或连接外部网络至关重要。
接下来,教程介绍了设置双网口的基本路由过程。首先,用户需在"IP-Addresses"目录下为每个接口添加所需的IP地址,例如在LAN口上分配192.168.0.1/255.255.255.0的地址。然后,用户会在"IP-Routers"中添加网关,比如将默认网关设为192.168.0.254,以便数据包正确路由。
在完成基础IP配置后,文档提到了一个重要的功能——IP伪装或NAT(网络地址转换)。这个功能允许路由器隐藏内部网络的IP地址,提供网络安全和访问控制。用户需要在"IP-firewall-src-nat"中创建策略,指定源地址范围为192.168.0.0/24,并激活NAT功能,这样外部请求就不会直接暴露内部网络的IP。
这篇教程详细地阐述了如何通过ROS Winbox的图形界面进行路由器的IP管理和路由配置,包括添加IP地址、设置网关以及启用NAT功能,这对于理解和管理复杂的网络环境尤其有用。无论是初次接触ROS的用户,还是有经验的网络管理员,都可以从中获益良多。
This document has been created with a DEMO version of PDF Create Convert
(http://www.fpsols.com/pdf_create_convert.html)
To remove this message please register.
NAT Router 图形管理操作手册
基本设置
在使用 NAT Router 图形管理前,必须在本机上启用和设置网卡
查看网卡状态:
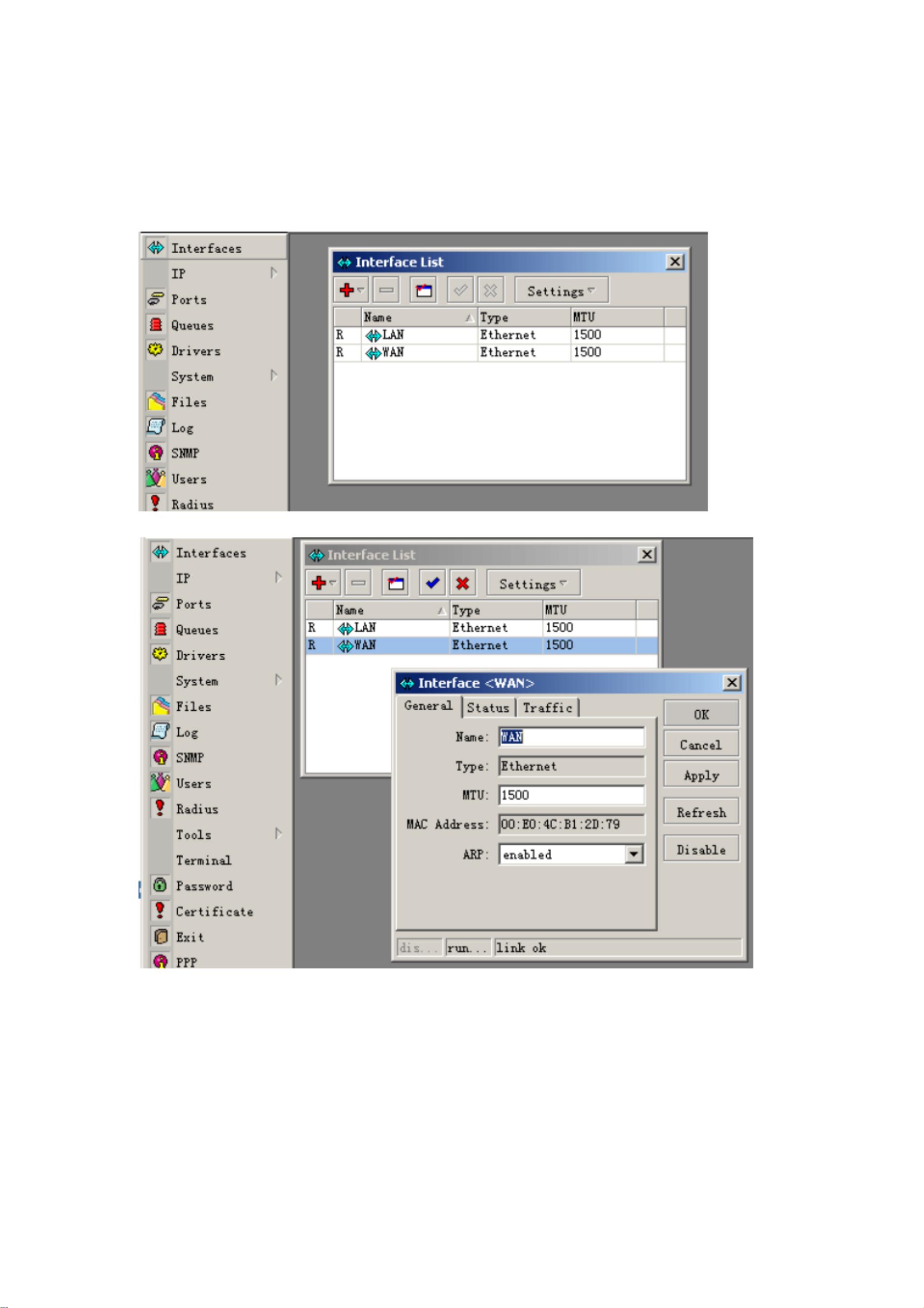
当我们需要查看路由器上的网卡使用情况,点开 Interfaces可以看到网卡的使用状况:
如果需要查看 WAN 口的使用情况,直接点开 Interface列表中的 WAN 口的选项
点开 Traffic 可以看到 WAN 口上的流量滢型图:
下载后可阅读完整内容,剩余9页未读,立即下载
2009-08-14 上传
2021-09-30 上传
2023-02-27 上传
2021-10-12 上传
103 浏览量

dtd13961139571
- 粉丝: 1
- 资源: 6万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 构建基于Django和Stripe的SaaS应用教程
- Symfony2框架打造的RESTful问答系统icare-server
- 蓝桥杯Python试题解析与答案题库
- Go语言实现NWA到WAV文件格式转换工具
- 基于Django的医患管理系统应用
- Jenkins工作流插件开发指南:支持Workflow Python模块
- Java红酒网站项目源码解析与系统开源介绍
- Underworld Exporter资产定义文件详解
- Java版Crash Bandicoot资源库:逆向工程与源码分享
- Spring Boot Starter 自动IP计数功能实现指南
- 我的世界牛顿物理学模组深入解析
- STM32单片机工程创建详解与模板应用
- GDG堪萨斯城代码实验室:离子与火力基地示例应用
- Android Capstone项目:实现Potlatch服务器与OAuth2.0认证
- Cbit类:简化计算封装与异步任务处理
- Java8兼容的FullContact API Java客户端库介绍
