双目视觉SLAM点线特征融合方法研究
需积分: 0 19 浏览量
更新于2024-06-30
3
收藏 21.38MB PDF 举报
"基于点线综合特征的双目视觉SLAM方法"
双目视觉SLAM(Simultaneous Localization and Mapping)是机器人技术中的一个关键组成部分,它允许机器人在未知环境中同时定位自身位置并构建环境的地图。这种方法结合了计算机视觉和传感器融合技术,具有广泛的应用前景,尤其是在自动驾驶、无人机导航和机器人探索等领域。
点特征是视觉SLAM中最为常见的特征类型,如SIFT(Scale-Invariant Feature Transform)、SURF(Speeded Up Robust Features)和ORB(Oriented FAST and Rotated BRIEF)等。点特征具有尺度不变性和旋转不变性,能较好地抵抗光照变化和图像噪声,使得它们能在不同视角下进行匹配,从而帮助机器人建立稳定的地图并估计自身的运动轨迹。
然而,仅依赖点特征的SLAM系统可能在结构较弱的环境中(如平坦区域)表现不佳,因为这些环境中点特征稀疏,可能导致定位精度下降。为解决这个问题,引入线特征作为补充。线特征,如Hessian线检测或角点检测,能够提供额外的几何信息,特别是在规则结构或直线条纹明显的场景中,线特征能增强系统的稳定性。
本文提出的“基于点线综合特征的双目视觉SLAM方法”旨在融合点特征和线特征的优点,以提高SLAM系统的鲁棒性和精度。通过结合两者,可以在点特征稀疏的区域中利用线特征来辅助定位,同时在点特征丰富的区域利用点特征进行更精确的匹配。双目视觉SLAM则利用两个相机之间的视差来计算深度信息,进一步增强三维空间的理解和地图构建。
实现这一方法通常包括以下步骤:首先,通过图像预处理提取点特征和线特征;然后,进行特征匹配和几何验证,以确保匹配的稳健性;接着,使用BA(Bundle Adjustment)优化算法来校正相机参数和地图点的位置,以最小化重投影误差;最后,结合特征匹配和位姿估计算法(如EKF-SLAM或GraphSLAM)更新机器人位姿和地图。
这篇硕士论文详细探讨了这一综合特征的双目视觉SLAM系统的设计、实现和实验验证。通过实际场景的测试,展示了该方法在提高定位精度和环境建模质量方面的有效性。论文还可能涵盖了误差分析、性能评估和与其他SLAM方法的比较,以证明其优越性。
这篇论文对于理解双目视觉SLAM系统中点线特征的综合应用具有重要的理论价值和实践意义,为未来在复杂或结构化环境中的机器人导航提供了新的解决方案。
浙江大学硕士学位论文
绪论
提出的LSD—SLAM(La唱e
Scale
Direct
Monocular
SLAM)【20]。LSD.SLAM同样
采用关键帧表达场景,使用逆深度作为三维点参数化形式,对不同尺度下的图像
使用直接跟踪法进行位姿估计,降低了两帧之间相对运动过大的影响。
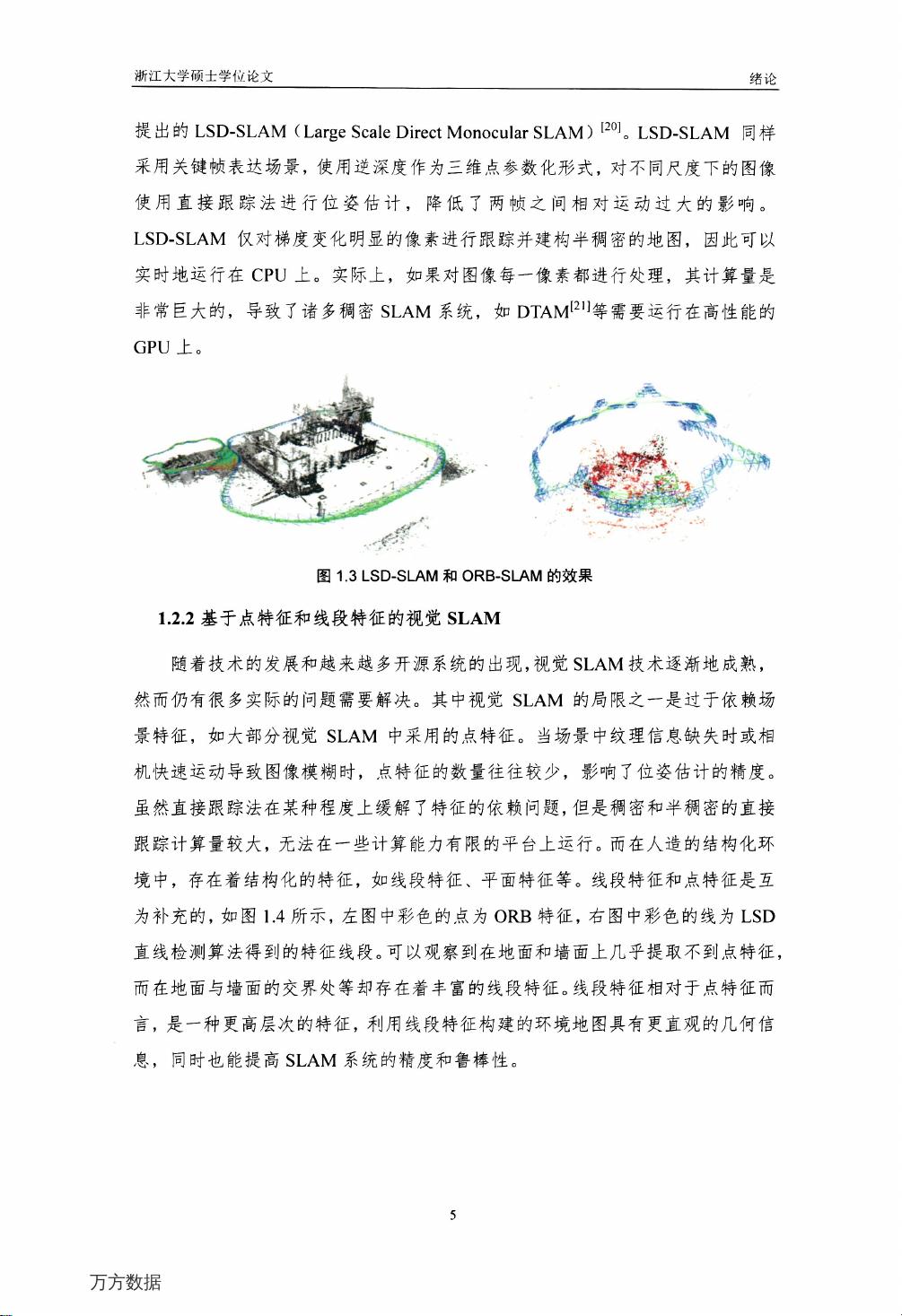
LSD-SLAM仅对梯度变化明显的像素进行跟踪并建构半稠密的地图,因此可以
实时地运行在CPU上。实际上,如果对图像每一像素都进行处理,其计算量是
非常巨大的,导致了诸多稠密SLAM系统,如DTAM【211等需要运行在高性能的
GPI
7匕。
L.澈
.广一≮
,’
。二.j.,.舔:
、、i
图1.3
LSD-SLAM和ORB-SLAM的效果
1.2.2基于点特征和线段特征的视觉SLAM
随着技术的发展和越来越多开源系统的出现,视觉SLAM技术逐渐地成熟,
然而仍有很多实际的问题需要解决。其中视觉SLAM的局限之一是过于依赖场
景特征,如大部分视觉SLAM中采用的点特征。当场景中纹理信息缺失时或相
机快速运动导致图像模糊时,点特征的数量往往较少,影响了位姿估计的精度。
虽然直接跟踪法在某种程度上缓解了特征的依赖问题,但是稠密和半稠密的直接
跟踪计算量较大,无法在一些计算能力有限的平台上运行。而在人造的结构化环
境中,存在着结构化的特征,如线段特征、平面特征等。线段特征和点特征是互
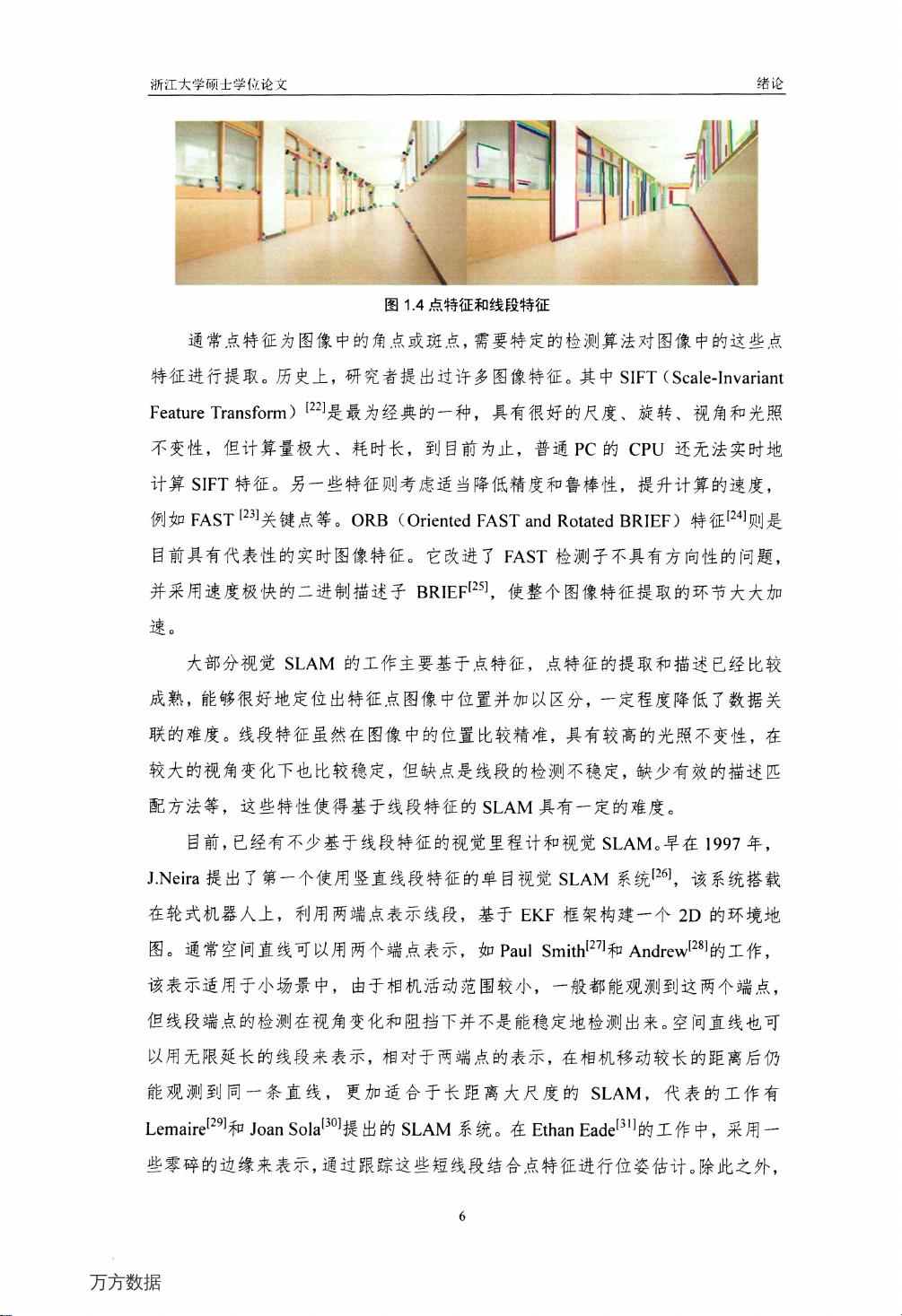
为补充的,如图1.4所示,左图中彩色的点为OI也特征,右图中彩色的线为LSD
直线检测算法得到的特征线段。可以观察到在地面和墙面上几乎提取不到点特征,
而在地面与墙面的交界处等却存在着丰富的线段特征。线段特征相对于点特征而
言,是一种更高层次的特征,利用线段特征构建的环境地图具有更直观的几何信
息,同时也能提高SLAM系统的精度和鲁棒性。
褥
万方数据
剩余86页未读,继续阅读
2022-08-03 上传
2023-10-23 上传
2022-08-03 上传
点击了解资源详情
2022-08-03 上传
2022-08-03 上传
2021-09-30 上传

卡哥Carlos
- 粉丝: 33
- 资源: 300
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
