
A Dynamic Deep Neural Network Design for
Efficient Workload Allocation in Edge Computing
Chi Lo, Yu-Yi Su, Chun-Yi Lee, and Shih-Chieh Chang
Dept. of Computer Science, National Tsing Hua University
No. 101, Sec. 2, Kuang-Fu Rd., Hsinchu, Taiwan 30013, R.O.C.
{chilo9212, wwball34}@gmail.com, {cylee, scchang}@cs.nthu.edu.tw
Abstract—Unreliable communication channels and limited
computing resources at the edge end are two primary constraints
of battery-powered movable devices, such as autonomous robots
and unmanned aerial vehicles (UAVs). The impact is espe-
cially severe for those performing deep neural network (DNN)
computations. With increasing demand for accuracy, the trend
in modern DNN designs is the use of cascaded modularized
layers. Implementing a deep network at the edge increases
computational workloads and resource occupancy, leading to an
increase in battery drain. Using a shallow network and offloading
workloads to backbone servers, however, incur significant latency
overheads caused by unstable communication channels. Hence,
dynamic DNN design techniques for efficient workload allocation
are urgently required to manage the amount of workload trans-
missions while achieving the required accuracy. In this paper, we
explore the use of authentic operation (AO) unit and dynamic
network structure to enhance DNNs. The AO unit defines a set
of stochastic threshold values for different DNN output classes
and determines at runtime if an input has to be transferred
to backbone servers for further analysis. The dynamic network
structure adjusts its depth according to channel availability.
Experiments have been comprehensively performed on several
well-known DNN models and datasets. Our results show that,
on an average, the proposed techniques are able to reduce the
amount of transmissions by up to 17% compared to previous
methods under the same accuracy requirement.
Keywords—Deep neural network, workload allocation, edge
computing, authentic operation, dynamic network structure
I. INTRODUCTION
Deep neural networks (DNNs) have emerged as a popular
design paradigm in the area of image classification and object
detection [1]–[12]. This is due to their capabilities to extract
high-level and abstract features from raw data. A number of
DNN architectures and training algorithms have been proposed
to improve the accuracy of multilayer perceptrons (MLPs) and
convolutional neural networks (CNNs) from different perspec-
tives [3]–[5]. With increasing demand for high accuracy, there
has been a trend in recent years to increase the number of lay-
ers of DNNs. Several state-of-the-art CNN architectures, such
as AlexNet [2], Network In Network (NIN) [6], VGGNet [7],
and GoogLeNet [8], contain from eight to dozens of hidden
layers. Researchers have even further pushed the network size
up to 152 layers [9], achieving an unprecedented error rate less
than 5% on the famous ImageNet dataset [13]. It is believed
that the deeper a network is, the higher the accuracy it delivers
[7]–[9]. However, deeper neural networks usually require more
computation, leading to higher workloads as well as resource
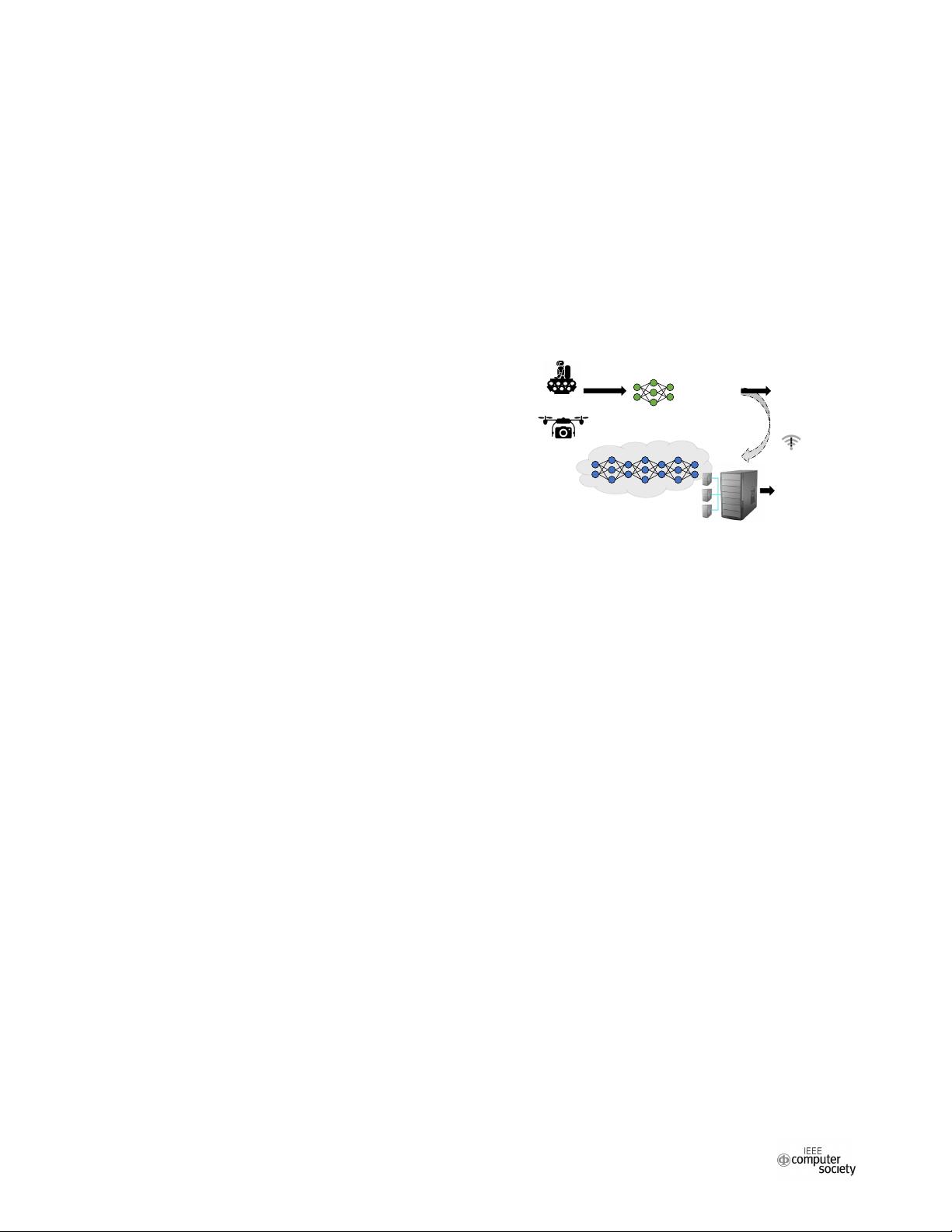
Robots
UAVs
Capture image
Built-in auxiliary network
Remote principal network
Trustworthy?
Yes
No
Unreliable
channel
Obtain
result
Obtain
result
Fig. 1: Workload sharing of DNN between edge and server
occupancy compared to shallower ones. These computational
workloads and resource requirements limit the scale of DNNs
to be executed on energy-constrained embedded devices. Thus,
an efficient method to manage the workloads of embedded
systems performing DNN computations is urgently needed.
The concept of edge computing [14]–[16] is to perform data
processing at the edge end, near the source of data. Edge-end
embedded devices, such as unmanned aerial vehicles (UAVs)
and autonomous robots, work synergistically with powerful
servers to provide performance in modern edge computing
systems. Edge-end devices usually have limited computational
capability and resources, thus only shallower DNNs (denoted
as auxiliary networks) can be accommodated, as compared to
the deeper ones (denoted as principal networks) executed at
the server end. In such systems, the edge devices may suffer
from unstable communication channels. When the communi-
cation channels are fully accessible, edge devices can leverage
both the auxiliary networks and principal networks to achieve
high DNN accuracy. When the channels are unstable, edge
devices can only share fewer workloads to the server. As a
result, utilizing the communication channels and efficiently
allocating workloads between an auxiliary network and a
principal network are of particular importance.
A promising strategy to deal with the above issues is to
allocate difficult DNN workloads to the principal network
at the remote server, while retaining easy ones at the edge.
Whether to transfer an input from the edge to the server
is determined by calculating its confidence level. Confidence
level is used as a measure of the reliability of a prediction.
The higher the confidence level is, the more trustworthy the
prediction might be. Fig. 1 illustrates such a scenario. The
input images captured by robots or UAVs are first analyzed
2017 IEEE 35th International Conference on Computer Design
1063-6404/17 $31.00 © 2017 IEEE
DOI 10.1109/ICCD.2017.49
273
下载后可阅读完整内容,剩余7页未读,立即下载

兰若芊薇
- 粉丝: 29
- 资源: 301
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++标准程序库:权威指南
- Java解惑:奇数判断误区与改进方法
- C++编程必读:20种设计模式详解与实战
- LM3S8962微控制器数据手册
- 51单片机C语言实战教程:从入门到精通
- Spring3.0权威指南:JavaEE6实战
- Win32多线程程序设计详解
- Lucene2.9.1开发全攻略:从环境配置到索引创建
- 内存虚拟硬盘技术:提升电脑速度的秘密武器
- Java操作数据库:保存与显示图片到数据库及页面
- ISO14001:2004环境管理体系要求详解
- ShopExV4.8二次开发详解
- 企业形象与产品推广一站式网站建设技术方案揭秘
- Shopex二次开发:触发器与控制器重定向技术详解
- FPGA开发实战指南:创新设计与进阶技巧
- ShopExV4.8二次开发入门:解决升级问题与功能扩展
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


