前馈改进PID算法提升智能车控制性能
需积分: 32 201 浏览量
更新于2024-09-15
2
收藏 102KB DOC 举报
本文主要探讨了前馈-改进PID算法在智能车控制中的应用,针对智能车系统的非线性和时变特性,传统PID算法可能无法提供理想的控制效果,因为它容易导致超调和振荡。文章首先介绍了智能车控制系统的基本构成,强调了飞思卡尔S12芯片在实现计算机控制中的关键作用。
为了优化控制性能,作者提出了两种改进的PID算法。第一种是不完全微分PID,它通过在一阶微分环节中加入一阶惯性环节,解决了原有微分环节对误差干扰突变过于敏感的问题。不完全微分使得微分输出在初始采样周期内减少,随后按比例衰减,这有助于减轻偏差干扰对速度控制的影响,提升了控制效果。不完全微分PID的结构和程序流程图在文中得到了详细阐述。
第二种改进是微分先行PID,该算法特别针对智能车在赛道上频繁转弯时的速度和方向设定值变化设计。微分先行PID仅对实际测量的速度和舵机偏转进行微分处理,而不是设定值,以此来平滑处理设定值变化造成的系统振荡。这种方法确保了在设定值变化时,输出保持稳定,从而提高了系统的响应性和鲁棒性。
本文通过结合前馈控制、模糊算法以及对PID算法的创新性改进,如不完全微分和微分先行,显著提高了智能车的动态性能、实时性和适应性,使其在复杂环境中能够展现出更佳的控制性能。这种技术对于智能车的实际应用具有重要意义,为车辆的精确控制提供了新的解决方案。
1 引言
智能车系统是一个时变且非线性的系统,采用传统 PID 算法的单一的反馈控制会使系统存在不
同程度的超调和振荡现象,无法得到理想的控制效果。本文将前馈控制引入到了智能车系统的
控制中,有效地改善了系统的实时性,提高了系统的反应速度[1];并且根据智能车系统的特点,
对数字 PID 算法进行了改进,引入了微分先行和不完全微分环节,改善了系统的动态特性;同
时,利用模糊控制具有对参数变化不敏感和鲁棒性强的特点[2],本文将模糊算法与 PID 算法相
结合,有效地提高了智能车的适应性和鲁棒性,改善了系统的控制性能。
2 改进 PID 算法
智能车的控制是由飞思卡尔公司的 S12 芯片完成,所以对智能车的控制要采用计算机控制方法。
本文针对智能车控制的特殊性,对传统数字 PID 算法做了一些改进,这样可以更好地满足智能
车控制的需要。
2.1 不完全微分 PID
将微分环节引入智能车的方向和速度控制,明显地改善了系统的动态性能,但对于误差干扰突
变也特别敏感,对系统的稳定性有一定的不良影响。为了克服上述缺点,本文在 PID 算法中加
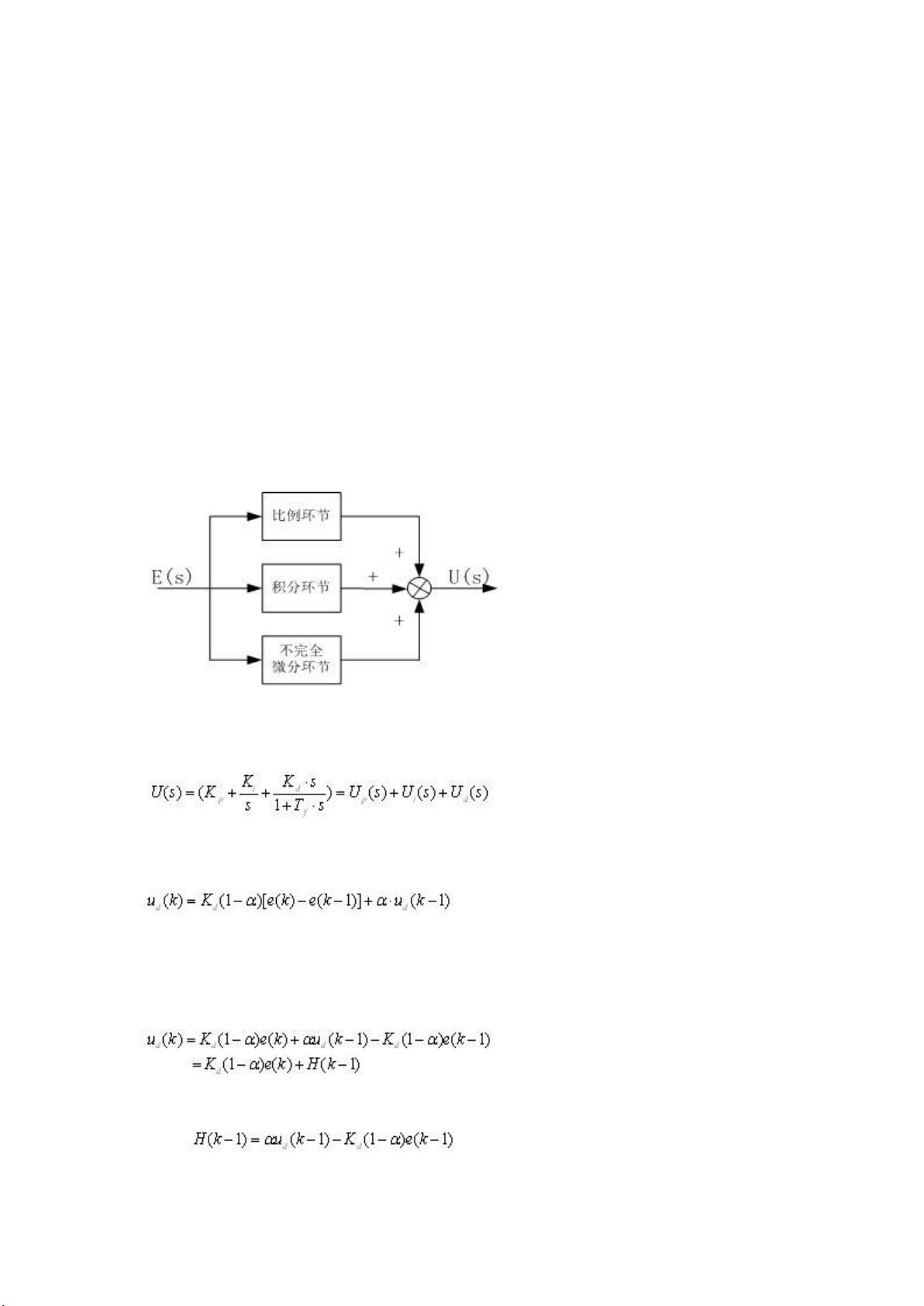
入了一阶惯性环节[3] ,不完全微分 PID 算法结构如图 1 所示。
图 1 不完全微分 PID 算法机构图
将一阶惯性环节直接加到微分环节上,可得到系统的传递函数为:
(1)
将(1)式的微分项推导并整理,得到方程如下:
(2)
式中, ,由系统的时间常数 和一阶惯性环节时间常数 决定的一个常数。
为了编程方便,可以将 2-2 式写成如下形式:
(3)
式中, 。
下载后可阅读完整内容,剩余3页未读,立即下载
2009-07-26 上传
2024-04-15 上传
点击了解资源详情
2021-09-10 上传
2024-05-10 上传
2019-07-30 上传
2021-10-07 上传

snowman63114
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- Elasticsearch核心改进:实现Translog与索引线程分离
- 分享个人Vim与Git配置文件管理经验
- 文本动画新体验:textillate插件功能介绍
- Python图像处理库Pillow 2.5.2版本发布
- DeepClassifier:简化文本分类任务的深度学习库
- Java领域恩舒技术深度解析
- 渲染jquery-mentions的markdown-it-jquery-mention插件
- CompbuildREDUX:探索Minecraft的现实主义纹理包
- Nest框架的入门教程与部署指南
- Slack黑暗主题脚本教程:简易安装指南
- JavaScript开发进阶:探索develop-it-master项目
- SafeStbImageSharp:提升安全性与代码重构的图像处理库
- Python图像处理库Pillow 2.5.0版本发布
- mytest仓库功能测试与HTML实践
- MATLAB与Python对比分析——cw-09-jareod源代码探究
- KeyGenerator工具:自动化部署节点密钥生成
