草莓采摘机器人草莓识别系统设计及实现
版权申诉
The strawberry picking robot is an intelligent mechanical harvesting system with perception and recognition capabilities, designed to automatically perform tasks such as strawberry fruit picking. This technology plays a significant role in reducing labor intensity, production costs, improving operational efficiency and product quality, and ensuring timely fruit picking. The focus of this study is on the accurate identification of strawberries in natural environments, using machine vision technology to effectively recognize fruit and provide necessary information for harvesting.
The image recognition technology for strawberries includes camera calibration, image capture, color space conversion, threshold segmentation, noise reduction, image filling, and determining the centroid of the strawberry. The positioning of strawberries utilizes a camera and two photoelectric position sensors to preliminarily locate the strawberries in space. The experimental results demonstrate that the research has met the requirements, successfully extracting strawberries and identifying their centroid coordinates, laying the foundation for subsequent work.
In conclusion, the research on the strawberry recognition system for the picking robot has made significant progress in achieving the goal of automating fruit harvesting tasks. By utilizing machine vision technology, the system can accurately identify strawberries in natural environments, providing essential information for efficient and high-quality harvesting. This study sets the stage for further advancements in the field of agricultural robotics and automation, bringing about practical benefits for farmers and the agricultural industry as a whole.
思想
[1]
。1983 年,第一台采摘机器人在美国诞生
[2]
。此后三十多年,美国、英国、
法国、荷兰、比利时、以色列、日本、韩国等国家相继展开了各种采摘机器人的
研究和开发,涉及到的研究对象主要有苹果、草莓、葡萄、西瓜、黄瓜、番茄、
茄子、甘蓝、生菜、莴苣、蘑菇等
[3]
。美国是最早进行釆摘机器人研究的国家,
采摘机器人可能成为美国农场的重要组成部分。美国先前是用抖动式收获机收获
加工用橙子,效率很高,但因为震动冲击的缘故, 不适合橙子的收获。佛罗里达大
学因此进行了橙子采摘机器人
[4-5]
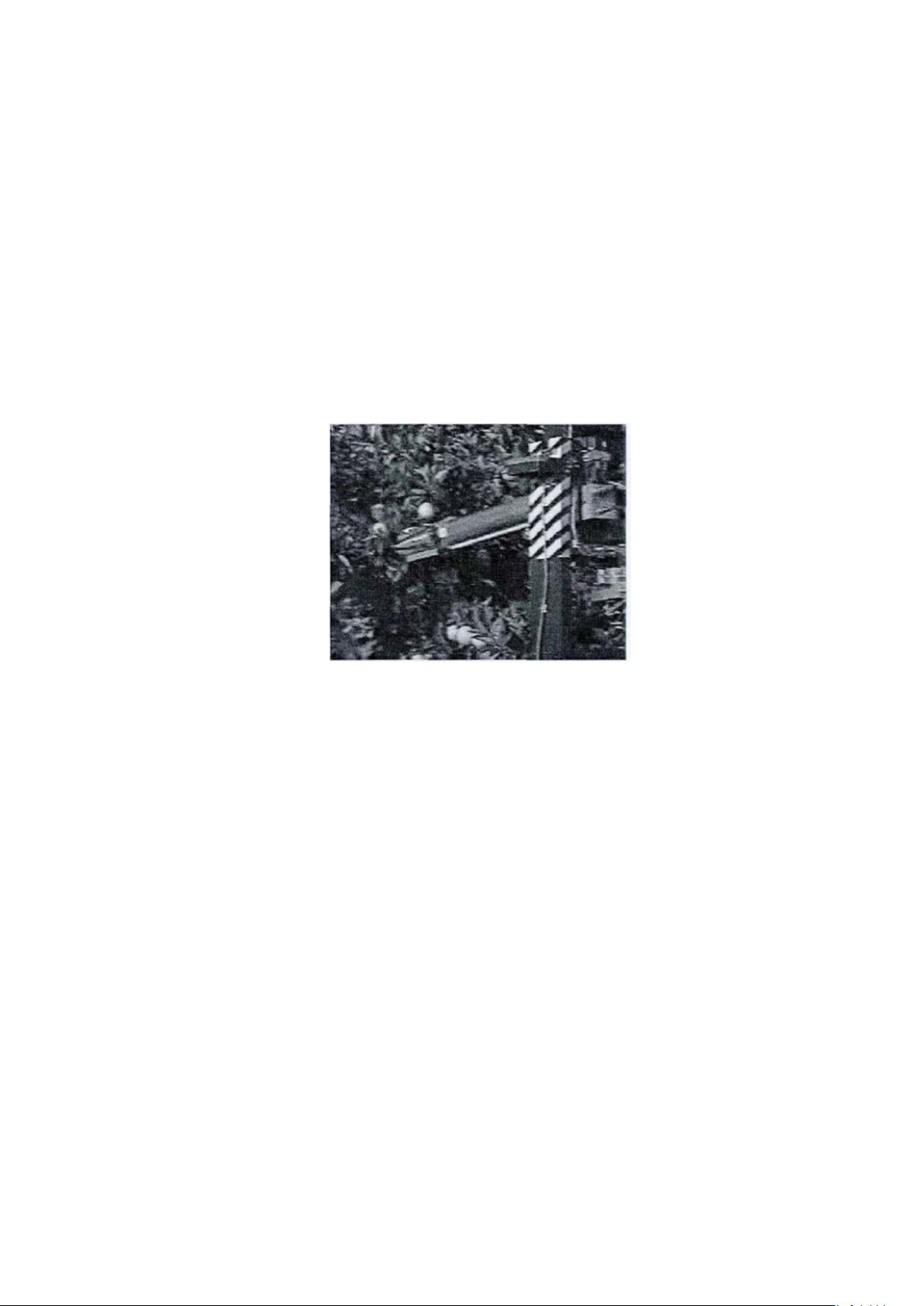
的研究。图 1-1 是可实现左右、上下和直线运
动的三自由度极坐标型液压驱动机器人,末端执行器中内置光源、彩色摄像机和
超声波传感器。当摄像机检出果实之后,末端执行器移向果实,同时超声波传感器
检测出距离,半圆形环切刀旋转,切断果梗。
图 1-1 橙子采摘机器人(美国)
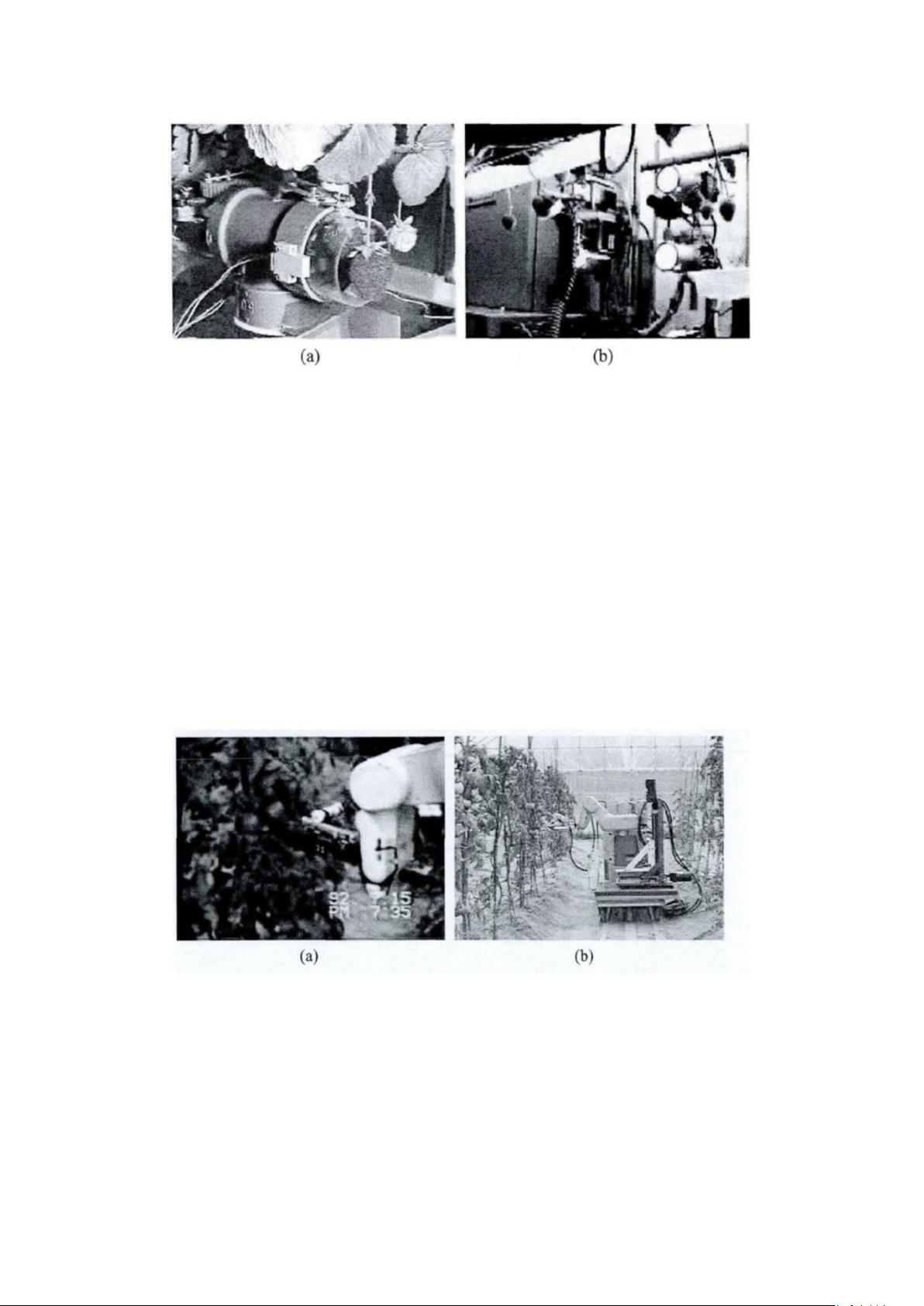
日本冈山大学研制的高架栽培草莓采摘机器人
[3][5]
(图 1-2(a))采用 3 自
由度直角坐标,末端执行器为了补偿视觉传感器的位置误差,采用了送风机吸引
的方法收获,可收获不同大小的果实。为判断果实是否被吸引进来,采用了 3 组光
电阻断器,通过吸盘旋转,将果梗送到切刀的位置切断。收下的果实在送风机引力
作用下通过管道,落入果盘。试验结果表明 4-7S 采摘一个果实,作为目标的果实
能够全部采摘,但是采摘时连同未成熟果实一起一次收获多个果实的情况有 50%。
钩式末端执行器在机构上方安装了钩子,可以把目标果实拉住继而进行采摘,所
以将邻近果实一起收下来的情况基本没有。生研中心和 SI 精工株式会社作为下
一代紧急项目正在研制实用化高架草莓采摘机器人,如图 1-2(b) 所示,它采用直
角坐标操作器,末端执行器有机械指和吸引壁,目标是实现夜间自采摘作业。
剩余39页未读,继续阅读
2019-07-22 上传
2024-03-31 上传
2023-07-11 上传
2021-10-10 上传
2024-10-18 上传
2024-10-18 上传
2024-10-18 上传

omyligaga
- 粉丝: 73
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 磁性吸附笔筒设计创新,行业文档精选
- Java Swing实现的俄罗斯方块游戏代码分享
- 骨折生长的二维与三维模型比较分析
- 水彩花卉与羽毛无缝背景矢量素材
- 设计一种高效的袋料分离装置
- 探索4.20图包.zip的奥秘
- RabbitMQ 3.7.x延时消息交换插件安装与操作指南
- 解决NLTK下载停用词失败的问题
- 多系统平台的并行处理技术研究
- Jekyll项目实战:网页设计作业的入门练习
- discord.js v13按钮分页包实现教程与应用
- SpringBoot与Uniapp结合开发短视频APP实战教程
- Tensorflow学习笔记深度解析:人工智能实践指南
- 无服务器部署管理器:防止错误部署AWS帐户
- 医疗图标矢量素材合集:扁平风格16图标(PNG/EPS/PSD)
- 人工智能基础课程汇报PPT模板下载
