双臂机器人协调控制研究:MATLAB与ADAMS联合仿真
版权申诉
19 浏览量
更新于2024-06-19
收藏 2.67MB PDF 举报
"该资源是一篇关于基于MATLAB与ADAMS联合仿真的双臂机器人协调技术研究的硕士毕业论文。论文探讨了双臂机器人在工业应用中的优势,尤其是在协调运动方面的需求,如路径规划、避碰和柔顺性控制。作者使用MATLAB作为控制器仿真工具,结合Robotic Toolbox进行运动学和轨迹规划,而ADAMS则用于构建机械结构并模拟实际运动。论文主要内容包括双臂机器人的系统介绍、运动学分析、运动规划、协调控制算法及其仿真验证。此外,还改进了人工势场法解决双臂自避碰问题,并通过MATLAB与ADAMS的联合仿真来模拟避障过程。关键词涉及双臂机器人、避碰、ADAMS和MATLAB联合仿真。"
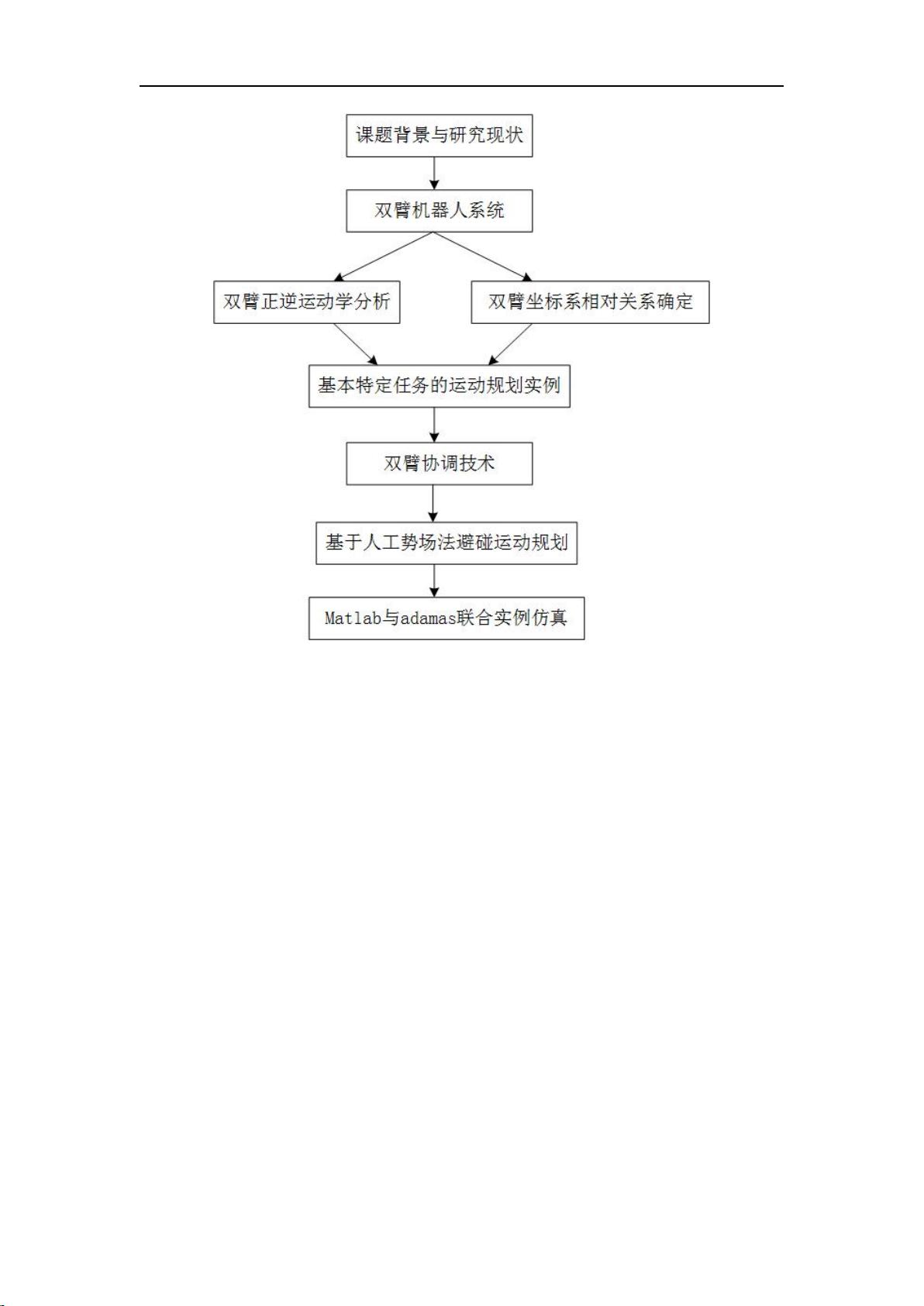
这篇论文深入研究了双臂机器人的协调技术,首先介绍了双臂机器人的硬件和软件系统,包括基于SolidWorks的关节模块化设计和以CODESYS为控制机制的软件系统。接着,论文详细阐述了双臂运动学,基于单臂运动学的理论,通过D-H参数建立了双臂六自由度的运动学模型,为后续的分析和规划提供基础。
在避碰策略方面,论文提出了一种改进的人工势场法,将左臂视为右臂的障碍物,利用椭球包围盒方法处理关节节点,确保右臂能规划出无碰撞的路径。这一方法在静态环境中尤为有效,能够防止双臂间的相互碰撞。
论文的核心创新点在于利用MATLAB和ADAMS进行联合仿真。在ADAMS中构建了UR5机器人的物理模型,而在MATLAB中进行任务描述和控制逻辑,通过输出转角参数给ADAMS,实现了对机器人运动的实时控制和轨迹跟踪。这种联合仿真方法使得研究人员能直观地观察双臂机器人的运动状态和末端关节轨迹,从而更好地评估和优化协调控制算法。
关键词:双臂机器人、避碰、ADAMS联合仿真、MATLAB、运动规划、协调控制、人工势场法。这些关键词突出了研究的主要焦点和技术手段,展示了作者在双臂机器人协调控制领域的深入探索。
山东科技大学硕士学位论文 绪论
5
1.2.2 国内研究现状
我国在双臂机器人还处在研究和开发的起步阶段,基本上只有在国内某些大
型企业和高校内进行研发和运用
[8]
。主要研究双臂机器人运动路径规划、动力学
以及协调控制等方面,与国外有些国家相比还有一定的差距,不过也取得了一定
的突破性进展。
上海交通大学研制的仿人双臂机器人,如图 1.9 所示,该双臂是由两个单七
自由度机械臂组成,头部两个自由度,可以进行搬运,倒水等工作。浙江大学研
制的“悟”和“空”机器人,可以进行乒乓球机器对打、人机对打等,具备快速识别
预测、高灵活性以及高稳定控制等能力,如图 1.10 所示。北京理工大学已经自
主研制出多款“汇童”仿人机器人,如图 1.11 所示,“汇童”的双臂两个关节都是六
自由度,能够自主行走、打招呼、打太极等。北京航空大学机器人研究所面向太
空舱内作业搭建了双臂机器人系统实验平台,如图 1.12 所示。
图 1.9 仿人双臂机器人 图 1.10“悟”和“空”机器人
Fig.1.9 Humanoid Dual-arm robot Fig.1.10 WU and Kong robot
图 1.10 “汇童”机器人 图 1.12 双臂空间机器人系统
Fig.1.10 HuiTong robot Fig.1.12 Dual-arm space robot
综上所述,与国外的双臂机器人相比,我国当前自动化技术和智能装备技术
水平比较落后,也受到研究条件和技术的限制,相关实验样机与实际应用还有一
定的距离,对形成产业规模相对还比较困难。另外,我国双臂机器人研究多集中

剩余72页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-10-30 上传
2023-11-01 上传
2023-10-30 上传
2023-08-22 上传
2023-11-01 上传
2023-10-29 上传


icwx_7550592
- 粉丝: 20
- 资源: 7163
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB实现小波阈值去噪:Visushrink硬软算法对比
- 易语言实现画板图像缩放功能教程
- 大模型推荐系统: 优化算法与模型压缩技术
- Stancy: 静态文件驱动的简单RESTful API与前端框架集成
- 掌握Java全文搜索:深入Apache Lucene开源系统
- 19计应19田超的Python7-1试题整理
- 易语言实现多线程网络时间同步源码解析
- 人工智能大模型学习与实践指南
- 掌握Markdown:从基础到高级技巧解析
- JS-PizzaStore: JS应用程序模拟披萨递送服务
- CAMV开源XML编辑器:编辑、验证、设计及架构工具集
- 医学免疫学情景化自动生成考题系统
- 易语言实现多语言界面编程教程
- MATLAB实现16种回归算法在数据挖掘中的应用
- ***内容构建指南:深入HTML与LaTeX
- Python实现维基百科“历史上的今天”数据抓取教程
