系统级标定提升捷联惯导系统精度:误差参数与卡尔曼滤波技术综述
版权申诉
本文档探讨了捷联惯导系统复杂误差参数的系统级标定方法,这一主题在导航领域具有重要意义。惯性测量单元(IMU)作为捷联惯导的核心组成部分,由激光陀螺和石英挠性加速度计构成,它们的精度直接影响系统的定位性能。传统标定方法包括分立式标定,通过高精度转台提供稳定的参考坐标,但这种方法受转台精度限制且成本较高。
系统级标定则是一种更为先进的技术,它利用导航解算过程中的误差来估计和补偿各种误差参数,如标度因数误差、零偏、安装角误差等,从而摆脱了转台精度的依赖。研究文献提供了多种标定路径设计,如18位置方案和25位置转动编排,这些设计旨在增强误差传递的独立性和可观测性。例如,刘冰等人采用高阶卡尔曼滤波算法,石文峰则设计了十位置的标定路径,同时考虑了内杆臂效应和加速度计的二次项误差。
内杆臂效应是由于IMU质心与加速度计敏感质心不一致导致的,这会导致导航误差,特别是在温度变化时,石英挠性加速度计的工作特性随温度改变,标定参数可能需要动态调整。因此,系统级标定不仅要处理常规的误差项,还需考虑到温度对加速度计性能的影响,以实现更精确的标定。
本文档深入剖析了卡尔曼滤波器在系统级标定中的关键作用,通过构建误差模型和传播方程,能够实时更新和估计误差参数,确保在实际应用中提供稳定且高精度的导航服务。系统级标定方法是提升捷联惯导系统性能的关键技术,对于提高导航系统的可靠性、精度和经济性具有重大价值。
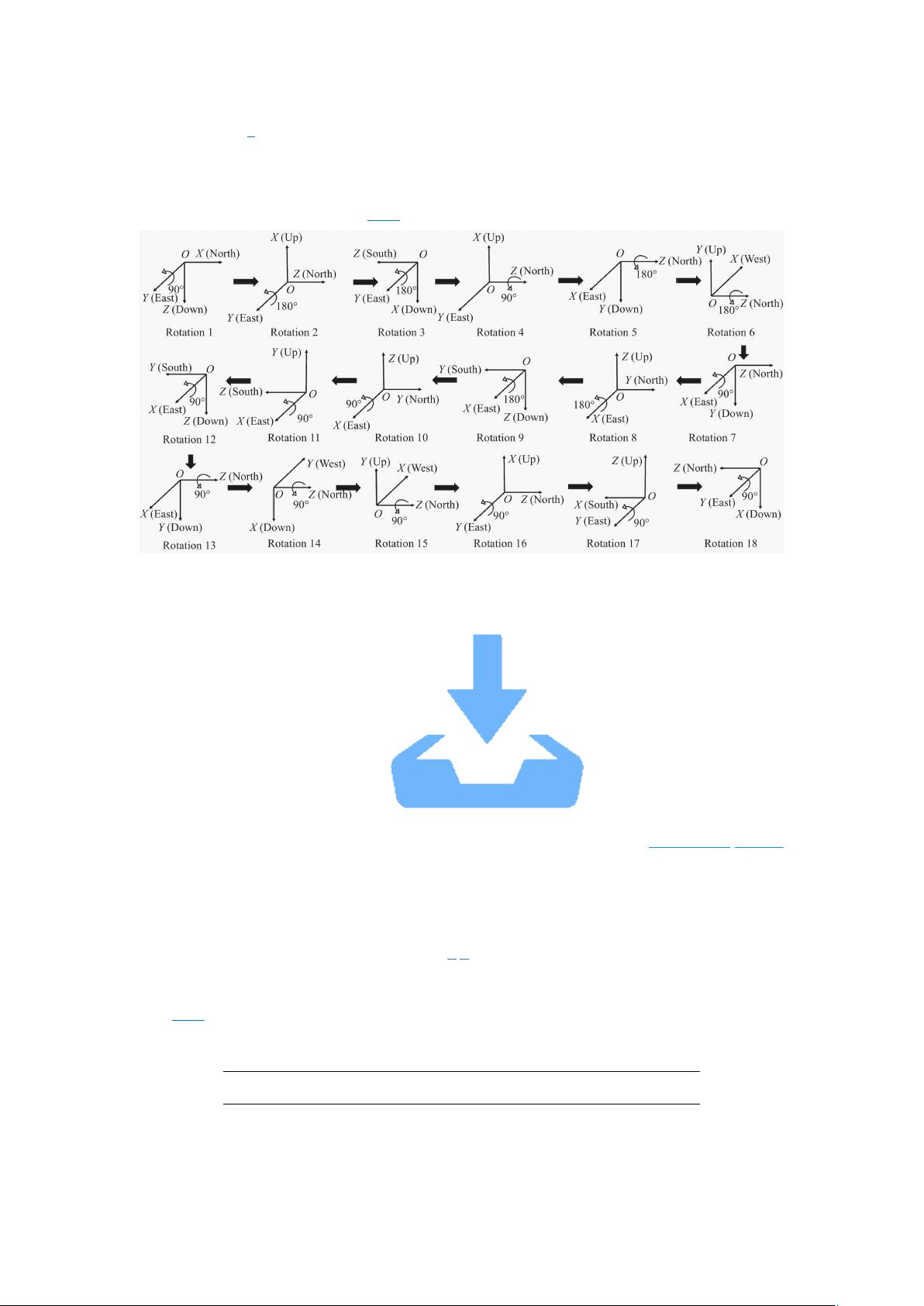
参考文献[5]设计了一种 18 次序标定路径,并且证明此路径可以有效标定出激光陀螺
和加速度计的零偏、标度因数误差和安装误差。为了充分激励加速度计的温度误差系数,
在此 18 次序标定路径的基础上,利用放置在转台上的温度控制试验箱控制标定过程的温度
持续变化,标定路径的示意图如图 1 所示。
图 1 18 次序标定路径示意图
Fig. 1 Diagramof 18-sequence calibration path
下载: 全尺寸图片 幻灯片
2.3 可观测性分析
为了验证改进的 18 次序标定路径激励误差参数的有效性,基于分段线性定常系统
(PWCS)对该标定路径进行可观测性分析
[17-18]
。对系统进行分段线性化,利用提取可观测
性矩阵(SOM)代替总体可观测性矩阵(TOM),计算标定路径下各位置 SOM 的秩,结
果如表 1 所示。
表 1 可观测性矩阵的秩
Tab. 1 Ranks of the SOM
Position
Ranks of the SOM
0
12
1
18
剩余19页未读,继续阅读
2021-11-17 上传
2023-02-23 上传
2023-02-23 上传
2021-11-30 上传
2023-02-23 上传
2023-02-23 上传
2023-02-23 上传
2023-02-23 上传

罗伯特之技术屋
- 粉丝: 4426
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android圆角进度条控件的设计与应用
- mui框架实现带侧边栏的响应式布局
- Android仿知乎横线直线进度条实现教程
- SSM选课系统实现:Spring+SpringMVC+MyBatis源码剖析
- 使用JavaScript开发的流星待办事项应用
- Google Code Jam 2015竞赛回顾与Java编程实践
- Angular 2与NW.js集成:通过Webpack和Gulp构建环境详解
- OneDayTripPlanner:数字化城市旅游活动规划助手
- TinySTM 轻量级原子操作库的详细介绍与安装指南
- 模拟PHP序列化:JavaScript实现序列化与反序列化技术
- ***进销存系统全面功能介绍与开发指南
- 掌握Clojure命名空间的正确重新加载技巧
- 免费获取VMD模态分解Matlab源代码与案例数据
- BuglyEasyToUnity最新更新优化:简化Unity开发者接入流程
- Android学生俱乐部项目任务2解析与实践
- 掌握Elixir语言构建高效分布式网络爬虫
