基于PLC的气动机械手设计:原理与控制系统详解
98 浏览量
更新于2024-06-24
收藏 165KB DOC 举报
该文档是一篇关于基于PLC的气动机械手设计的学士学位论文,涵盖了多个关键章节。论文首先在第一章绪论中介绍了气动机械手的基本概念,阐述了它的组成(包括操作机、控制器、伺服驱动系统和检测传感装置),强调了其在柔性生产中的重要性,如提高生产效率和产品质量。气动机械手被视为机电一体化自动化设备,融合了计算机、控制论、人工智能等多种技术。
第二章详细设计了机械手的各个部分,包括坐标型式、手部、手腕和手臂结构方案,以及驱动和控制方案。设计过程中注重机械手的自由度和主要参数的选择,确保其能够完成各种作业任务。
第三章重点讨论了气动系统的构建,包括气压传动的工作原理图,这表明了气动机械手的动力来源和传输方式。
第四章深入探讨了PLC(可编程序控制器)在机械手控制系统中的应用。作者介绍了PLC的基本概念,三菱FX2n系列PLC的特点,并阐述了如何通过X/Y接口进行通信。这部分内容涉及了电路设计、系统输入输出分配、机械手程序设计以及各个模块的详细编程。
最后,在第五章,作者总结了整个设计的研究成果,指出气动机械手在现代工业生产中的实际价值,以及它如何结合了人类和机器的优点,提升了生产效率和安全性。
这篇论文提供了从整体到细节的全面设计思路,展示了作者对气动机械手及其PLC控制系统的深入理解和实践能力,对于理解PLC在工业自动化中的应用具有很高的参考价值。
4
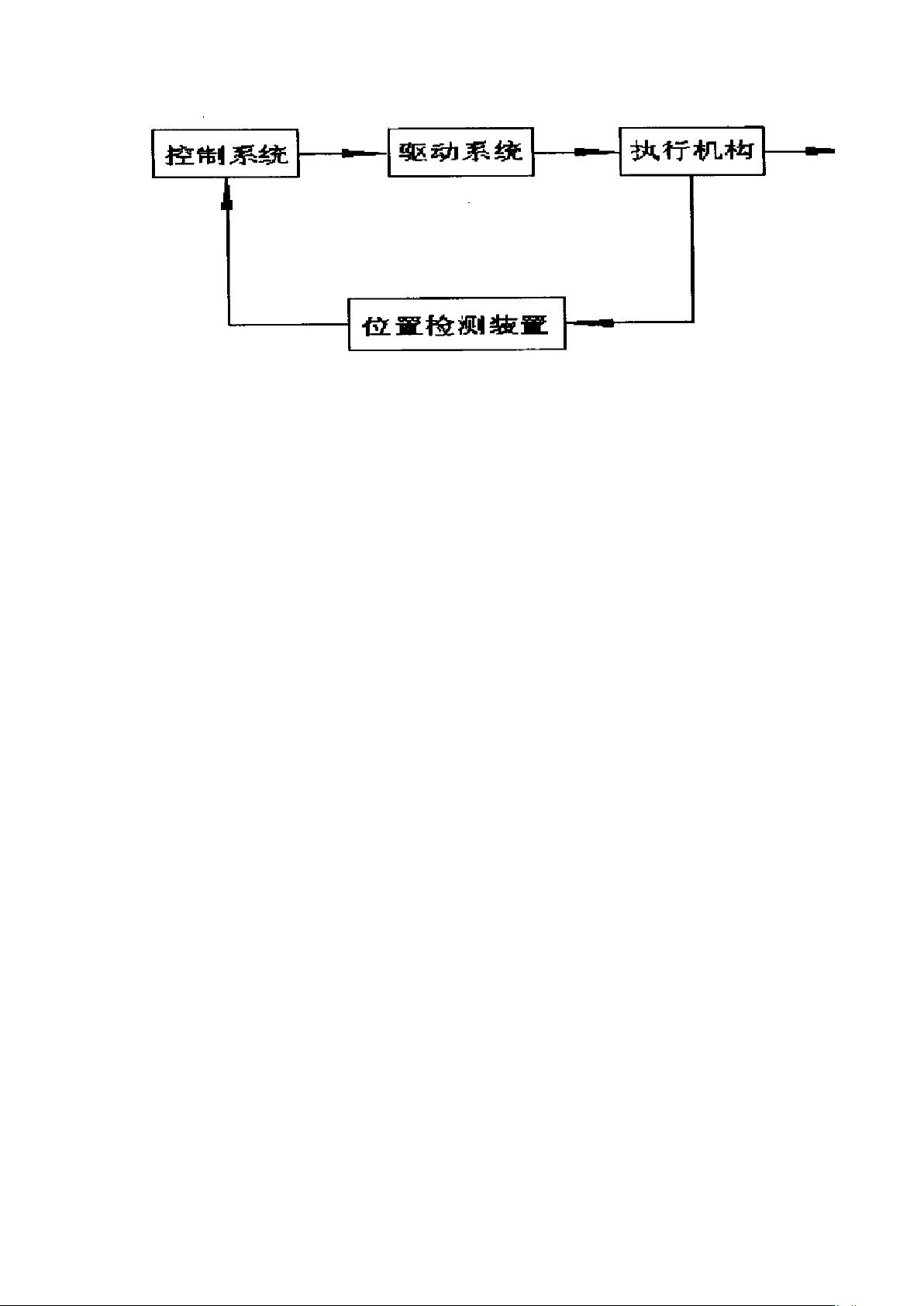
图1-1机械手组成方框图:
Pane chart of composition of manipulator
(一)执行机构
包括手部、手腕、手臂和立柱等部件,有的还增设行走机构。
1、手部
即与物件接触的部件。由于与物件接触的形式不同,可分为夹持式和吸
附式手在本课题中我们采用夹持式手部结构。夹持式手部由手指(或手爪)和
传力机构所构成。手指是与物件直接接触的构件,常用的手指运动形式有回
转型和平移型。回转型手指结构简单,制造容易,故应用较广泛。平移型应
用较少,其原因是结构比较复杂,但平移型手指夹持圆形零件时,工件直径
变化不影响其轴心的位置,因此适宜夹持直径变化范围大的工件。手指结构
取决于被抓取物件的表面形状、被抓部位(是外廓或是内孔)和物件的重量及
尺寸。常用的指形有平面的、V形面的和曲面的:手指有外夹式和内撑式;指
数有双指式、多指式和双手双指式等。而传力机构则通过手指产生夹紧力来
完成夹放物件的任务。传力机构型式较多时常用的有:滑槽杠杆式、连杆杠
杆式、斜面杠杆式、齿轮齿条式、丝杠螺母弹簧式和重力式等。
2、手腕
是连接手部和手臂的部件,并可用来调整被抓取物件的方位(即姿势)
3、手臂
手臂是支承被抓物件、手部、手腕的重要部件。手臂的作用是带动手指
去抓取物件,并按预定要求将其搬运到指定的位置.工业机械手的手臂通常由驱
动手臂运动的部件(如油缸、气缸、齿轮齿条机构、连杆机构、螺旋机构和凸轮
机构等)与驱动源(如液压、气压或电机等)相配合,以实现手臂的各种运动。
4、立柱
立柱是支承手臂的部件,立柱也可以是手臂的一部分,手臂的回转运动
和升降(或俯仰)运动均与立柱有密切的联系。机械手的立柱因工作需要,有
时也可作横向移动,即称为可移式立柱。
剩余24页未读,继续阅读
2023-07-10 上传
2023-07-02 上传
2023-07-02 上传
2023-07-09 上传
2023-07-09 上传
2023-07-02 上传

matlab大师
- 粉丝: 2695
- 资源: 8万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- ES管理利器:ES Head工具详解
- Layui前端UI框架压缩包:轻量级的Web界面构建利器
- WPF 字体布局问题解决方法与应用案例
- 响应式网页布局教程:CSS实现全平台适配
- Windows平台Elasticsearch 8.10.2版发布
- ICEY开源小程序:定时显示极限值提醒
- MATLAB条形图绘制指南:从入门到进阶技巧全解析
- WPF实现任务管理器进程分组逻辑教程解析
- C#编程实现显卡硬件信息的获取方法
- 前端世界核心-HTML+CSS+JS团队服务网页模板开发
- 精选SQL面试题大汇总
- Nacos Server 1.2.1在Linux系统的安装包介绍
- 易语言MySQL支持库3.0#0版全新升级与使用指南
- 快乐足球响应式网页模板:前端开发全技能秘籍
- OpenEuler4.19内核发布:国产操作系统的里程碑
- Boyue Zheng的LeetCode Python解答集
