有限时间策略实现气味源精准定位
93 浏览量
更新于2024-08-26
收藏 958KB PDF 举报
本文主要探讨了基于有限时间运动控制策略(FTMCS)的气味源定位问题,该策略对于多机器人系统具有重要意义。FTMCS的核心在于它结合了有限时间并行运动控制算法和有限时间圆周运动控制算法,旨在提高定位精度和效率。
在运动控制架构的设计中,文章首先定义了两个关键模块:1) 协调控制模块;2) 跟踪控制模块。协调控制模块是策略的核心,通过机器人之间的通信,它们能够同步虚拟位置和虚拟速度。这个模块的目标是在有限时间内实现虚拟速度的一致性,并确保由势函数决定的精确虚拟形状得以实现。这种一致性至关重要,因为它确保了整个团队的行动协同一致,提高了整体定位的准确性。
跟踪控制模块则负责让每个机器人实际的速度和位置在有限的时间内紧密跟随虚拟速度和位置,这通过实施一种高效的有限时间跟踪控制算法来实现。这种实时的跟踪能力确保了机器人能够快速响应并精确地定位到目标气味源。
论文进一步提出了一种有限时间并行运动控制算法,用于控制一组机器人跟随气味线索的方向,以及一种有限时间圆周运动控制算法,使机器人团队能够在搜索过程中形成有效的搜寻路径。这些算法的设计旨在优化资源分配和运动路径,使得整个系统能够在最短的时间内高效地完成气味源的定位任务。
实验部分通过仿真验证了FTMCS的有效性,展示了在有限时间内,使用这种策略的多机器人系统在复杂环境中的性能提升,比如在拥挤的空间或存在干扰的环境中,其定位准确性和反应速度明显优于传统方法。
本文的贡献在于提供了一种创新的、适用于多机器人系统的有限时间运动控制策略,这对于提高环境感知、搜索与救援、污染源追踪等应用领域的效率和精度具有实际价值。
LU et al.: FTMCS FOR ODOR SOURCE LOCALIZATION 5421
TABLE I
P
ARAMETERS OF THE P3-DX MOBILE ROBOTS
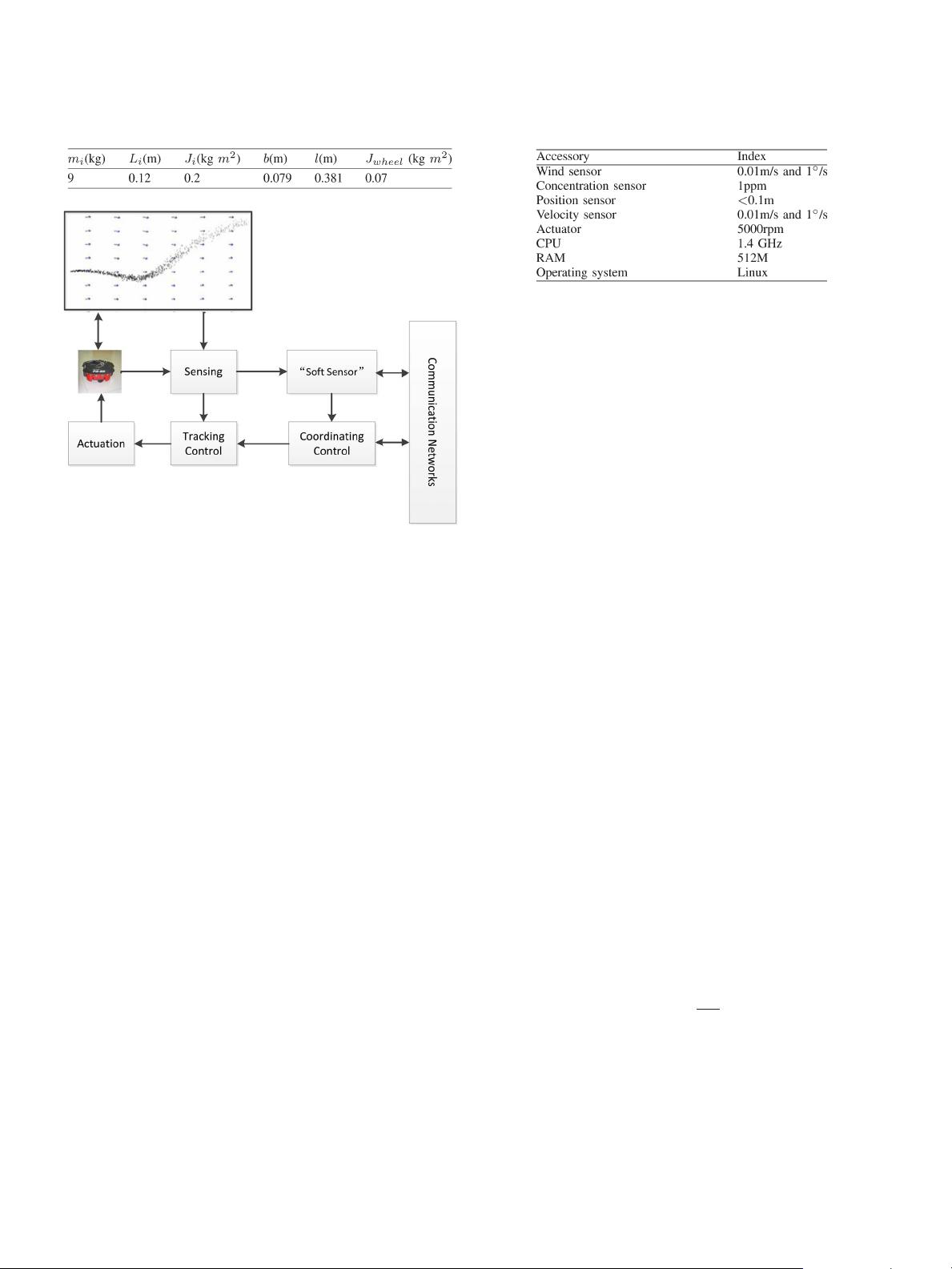
Fig. 2. Motion control architecture.
III. COORDINATING CONTROL AND TRACKING CONTROL
In this section, we will propose a motion control architecture
and describe each module in this architecture.
A. Motion Control Architecture
The proposed motion control architecture, which consists of
five modules, i.e., a sensing module, a soft sensor module, a
coordinating control module, a tracking control module, and an
actuation module, is illustrated in Fig. 2.
1) Module Description: For the sensing module, the input
data are from two aspects: 1) from the robot; and 2) from
the environment. Moreover, the sensing module enables trans-
ferring the real velocity, the real position of the robot, and
environmental information as the output data into the tracking
control module and the soft sensor module. For the coordinating
control module, the input data are the position of the odor
source, the virtual positions of other robots, and the virtual
velocities of other robots. Moreover, the virtual velocity and
virtual position of the current robot as the output data of the
module are transferred into the tracking control module. For the
tracking control module, the input data are the virtual velocity,
the virtual position, the real position, and the r eal velocity,
whereas the output data are the applied torque for the left
wheel and that for the right wheel of robots. In the proposed
motion control architecture, the soft sensor can be used to
“measure” the position of the odor source. In order to run the
soft sensor, the input data, which are from the sensing module
and communication networks, are the positions of robots, the
odor concentration, and the wind velocity. In addition, the
output data are the positions of the odor source [14].
2) Specification of Mobile Robots: In order to enable the
motion control architecture to run at real mobile robots, the
TABLE II
S
PECIFICATIONS OF THE MOBILE ROBOT
specifications for mobile robots need to be described. Specif-
ically, four kinds of information, including wind velocities,
odor concentrations, robot positions, and robot velocities, need
to be detected. Correspondingly, the required detection r eso-
lutions are given in Table II. For the wind sensor, in order
to satisfy the resolutions, we can use WindSonic produced by
Gill Instruments Ltd. as the wind sensor. For the concentration
sensor, we can use e2v MiCS-5524 as the concentration sensor
to detect carbon monoxide, hydrocarbons, and volatile organic
compounds. The Differential Global Positioning System and an
encoder can be used to get the position and velocity with the
corresponding resolutions. For the actuator, the Pittman brush
direct current motors can be used. Moreover, the soft sensor,
the coordinating control algorithm, and the tracking control
algorithm can run at the hardware environment with Pentium M
1.4 GHz with 512 MB of random access memory. The operation
system is Linux. In order to satisfy the aforementioned require-
ments, the mainboard PCM-9584 can be employed.
B. Potential Function
The potential functions have been widely used f or robot
navigation and control. Various functions have been proposed
for different aims [4], [19], [23]. In this paper, we consider the
following potential function form as
J = f (x
i
− x
j
2
)
where f : R
2
× R
2
→ R denotes a map, x
i
− x
j
2
refers to
the distance between the ith robot and the jth robot, and ·
2
denotes the two-norm. Moreover, this kind of potential function
should have the following properties.
1) Potential function J has the zero minimum at x
i
−
x
j
2
= d, where d>0 is a predefined constant.
2) There exists a constant c>0 such that the potential
function satisfies
J ≤ c
N
i=1
∂J
∂x
i
2
2
.
It is obvious that we can always build a potential function
that possesses the aforementioned properties. For example,
the potential function proposed by Olfati-Saber [21] has the
aforementioned properties.
C. Coordinating Control
In the coordinating control module, we provide the following
finite-time coordinating control algorithm, which can enable the
剩余11页未读,继续阅读
2021-03-10 上传
2021-11-07 上传
2021-03-17 上传
2023-06-13 上传
2023-08-26 上传
2023-04-07 上传
2023-09-09 上传
2024-11-03 上传
2023-04-11 上传

weixin_38691641
- 粉丝: 5
- 资源: 929
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
