基于虚拟工作原理的并联机器人动态分析新方法
需积分: 49 160 浏览量
更新于2024-07-18
5
收藏 134KB PDF 举报
本文主要探讨了并联机器人的动力学分析,特别是针对Stewart平台(Gough-Stewart平台)的一种新颖方法。文章标题"并联机器人动力学分析"强调了在并联机械结构设计中的动态性能研究,这是一种重要的工程问题,因为动力学性能直接影响到系统的稳定性和效率。
传统的动力学分析方法,如牛顿-欧拉法(Newton-Euler approach),是通过分解每个构件的动力学行为,然后组合起来得出整个系统的动态特性。然而,这种方法在处理复杂并联机器人,如具有六个自由度的三维空间机构时,可能会面临计算复杂性高的挑战。
作者杰戈·王和克莱蒙特·戈塞尔林提出了一种基于虚拟工作原理的新方法。虚拟工作原理是一种强大的工具,它将力和位移的乘积转换为能量变化,简化了动力学问题的求解过程。这种方法首先通过一个简单的平面四杆机构为例,展示了如何应用新方法进行分析,使得复杂运动的解析变得直观易懂。
接着,他们扩展到了更为复杂的Gough-Stewart平台,这是一个典型的并联机器人,其每个关节采用直线驱动器,允许六个独立的运动方向。通过新方法,作者能够有效地处理这种空间六自由度系统的动力学问题,相较于传统的牛顿-欧拉法,新方法在计算效率上具有显著优势,尤其是在大型并联机器人的仿真和控制设计中。
文中还提到了关键词,如“平行机器人”、“并联机制”、“动力学”、“虚拟工作”和“模拟”,这些都强调了文章的核心关注点。最后,作者通过数值示例进一步证实了新方法的有效性和实用性,这为并联机器人的设计者和工程师提供了一个更高效且精确的动力学分析工具。
总结来说,这篇文章不仅介绍了并联机器人动力学分析的新途径,而且提供了实际应用案例,对提升并联机械系统的设计效率和性能优化具有重要意义。对于从事并联机器人、机械工程或者控制理论研究的读者来说,理解和掌握这种基于虚拟工作原理的分析方法无疑是一项宝贵的知识积累。
320 J. WANG AND C.M. GOSSELIN
r
C
C
l
l
l
C
m
m
1
1
2
2
1
3
3
3
2
00
(x , y )
x
y
O
3
A
B
O’
r
r
1
θ
2
m
α
φ
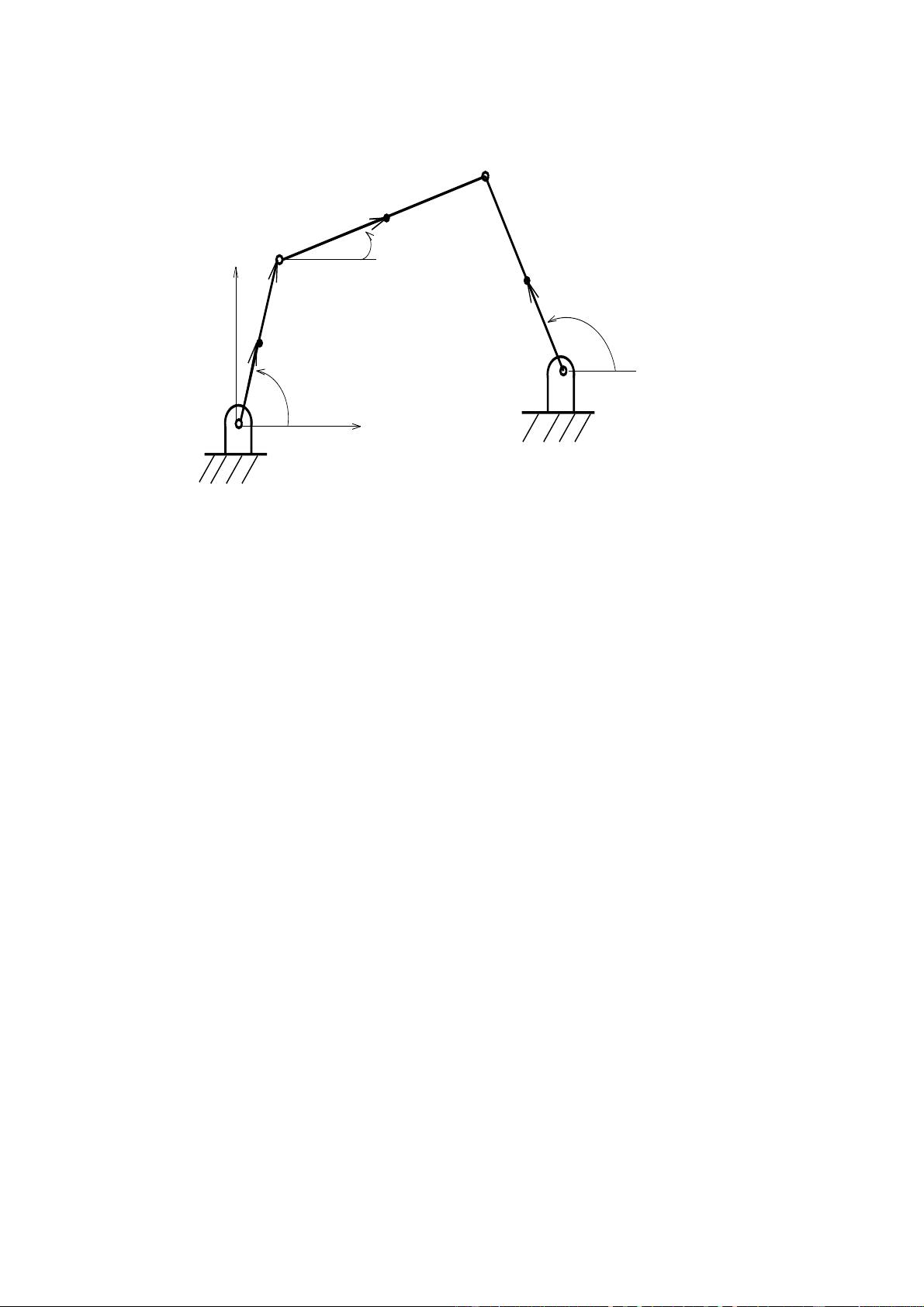
Figure 1. Geometric representation of the four-bar linkage.
Having obtained the angular velocity and acceleration of each link, one can
easily compute the acceleration of the centers of mass as
a
1
=
¨
θEr
1
−
˙
θ
2
r
1
, (11)
a
2
=
¨
θEl
1
−
˙
θ
2
l
1
+¨αEr
2
−˙α
2
r
2
, (12)
a
3
=
¨
φEr
3
−
˙
φ
2
r
3
, (13)
where r
i
and a
i
(i = 1, 2, 3) are respectively the position vector and the accel-
eration of the center of mass of the ith link, E is a rotation matrix written as
E =
0 −1
10
,l
1
is the position vector from O to A, as represented in Figure 1,
and
r
1
=
r
1
cos θ
r
1
sin θ
, r
2
=
r
2
cos α
r
2
sin α
,
r
3
=
r
3
cos φ
r
3
sin φ
, l
1
=
l
1
cos θ
l
1
sin θ
. (14)
The orientation matrix of the ith (i = 1, 2, 3) moving link can be written as
Q
1
=
"
cos θ −sin θ 0
sin θ cos θ 0
001
#
,Q
2
=
"
cos α −sin α 0
sin α cos α 0
001
#
,
Q
3
=
"
cos φ −sin φ 0
sin φ cos φ 0
001
#
. (15)
剩余17页未读,继续阅读
2013-12-05 上传
2021-08-11 上传
2021-08-14 上传
2021-08-14 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情

sinat_36198228
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- Aspose资源包:转PDF无水印学习工具
- Go语言控制台输入输出操作教程
- 红外遥控报警器原理及应用详解下载
- 控制卷筒纸侧面位置的先进装置技术解析
- 易语言加解密例程源码详解与实践
- SpringMVC客户管理系统:Hibernate与Bootstrap集成实践
- 深入理解JavaScript Set与WeakSet的使用
- 深入解析接收存储及发送装置的广播技术方法
- zyString模块1.0源码公开-易语言编程利器
- Android记分板UI设计:SimpleScoreboard的简洁与高效
- 量子网格列设置存储组件:开源解决方案
- 全面技术源码合集:CcVita Php Check v1.1
- 中军创易语言抢购软件:付款功能解析
- Python手动实现图像滤波教程
- MATLAB源代码实现基于DFT的量子传输分析
- 开源程序Hukoch.exe:简化食谱管理与导入功能
