CMSIS-RTOS RTX配置指南:系统与线程管理
需积分: 10 102 浏览量
更新于2024-09-05
收藏 172KB PDF 举报
"RTX v5配置手册详细介绍了如何配置CMSIS-RTOS RTX系统,包括系统设置、线程管理、定时器管理、事件标志、互斥锁、信号量、内存池以及消息队列等功能。此外,还有针对事件记录器的配置参数。"
在配置CMSIS-RTOS RTX(Real-Time eXecutive for Embedded Microcontroller Systems Interface)时,"RTX_Config.h" 文件是至关重要的,它定义了所有必要的配置参数。以下是各个配置部分的详细说明:
1. **系统配置**:这部分涉及到全局内存池、滴答频率、中断服务例程(ISR)事件缓冲区和轮询线程切换等系统级设置。全局内存池管理着操作系统内核的内存分配,滴答频率决定调度器的时间间隔,ISR事件缓冲区用于存储中断事件,而轮询线程切换则关乎多线程环境中的执行策略。
2. **线程配置**:线程管理功能的参数允许用户定制线程的栈大小、优先级、挂起/恢复行为以及时间限制等。这些设置直接影响到任务调度的效率和响应速度。
3. **定时器配置**:定时器管理的参数涉及定时器的精度、类型(周期性或一次性)以及超时回调函数等。定时器在实时系统中用于触发周期性任务或者等待特定时间间隔后执行操作。
4. **事件标志配置**:事件标志功能的参数可以调整创建、设置、清除和等待事件标志的行为。事件标志常用于线程间的通信和同步。
5. **互斥锁配置**:互斥锁管理参数用于控制互斥锁的获取、释放、超时策略和优先级继承等。互斥锁保证了对共享资源的独占访问,防止数据竞争。
6. **信号量配置**:信号量功能的参数包括信号量类型(计数或二进制)、初始化值、获取和释放策略等。信号量用于多线程间同步和资源管理。
7. **内存池配置**:内存池功能的参数涉及内存块大小、数量和内存分配策略。内存池提供了一种动态内存分配机制,可避免频繁的堆操作带来的开销。
8. **消息队列配置**:消息队列的参数可以调整队列的大小、消息大小和消息发送/接收策略。消息队列允许线程间安全地传递结构化数据。
9. **事件记录器配置**:这部分的参数让开发者能够启用和配置RTX与事件记录器的集成,以收集运行时信息,便于调试和性能分析。
理解并正确配置这些参数对于优化RTOS的性能、可靠性和资源利用率至关重要。开发者应根据应用的具体需求来调整这些设置,以达到最佳的实时系统性能。
Configure RTX v5
The file "RTX_Config.h" defines the configuration parameters of CMSIS-RTOS RTX and must be part of every project that is using the CMSIS-RTOS RTX kernel. The configuration options are explained in detail in the following sections:
System Configuration covers system-wide settings for the global memory pool, tick frequency, ISR event buffer and round-robin thread switching.
Thread Configuration provides several parameters to configure the Thread Management functions.
Timer Configuration provides several parameters to configure the Timer Management functions.
Event Flags Configuration provides several parameters to configure the Event Flags functions.
Mutex Configuration provides several parameters to configure the Mutex Management functions.
Semaphore Configuration provides several parameters to configure the Semaphores functions.
Memory Pool Configuration provides several parameters to configure the Memory Pool functions.
Message Queue Configuration provides several parameters to configure the Message Queue functions.
Event Recorder Configuration provides several parameters to configure RTX for usage with Event Recorder.
The file "RTX_Config.c" contains default implementations of the functions osRtxIdleThread and osRtxErrorNotify. Both functions can simply be overwritten with a customized behavior by redefining them as part of the user code.
The configuration file uses Configuration Wizard Annotations. Refer to Pack - Configuration Wizard Annotations for details. Depending on the development tool, the annotations might lead to a more user-friendly graphical
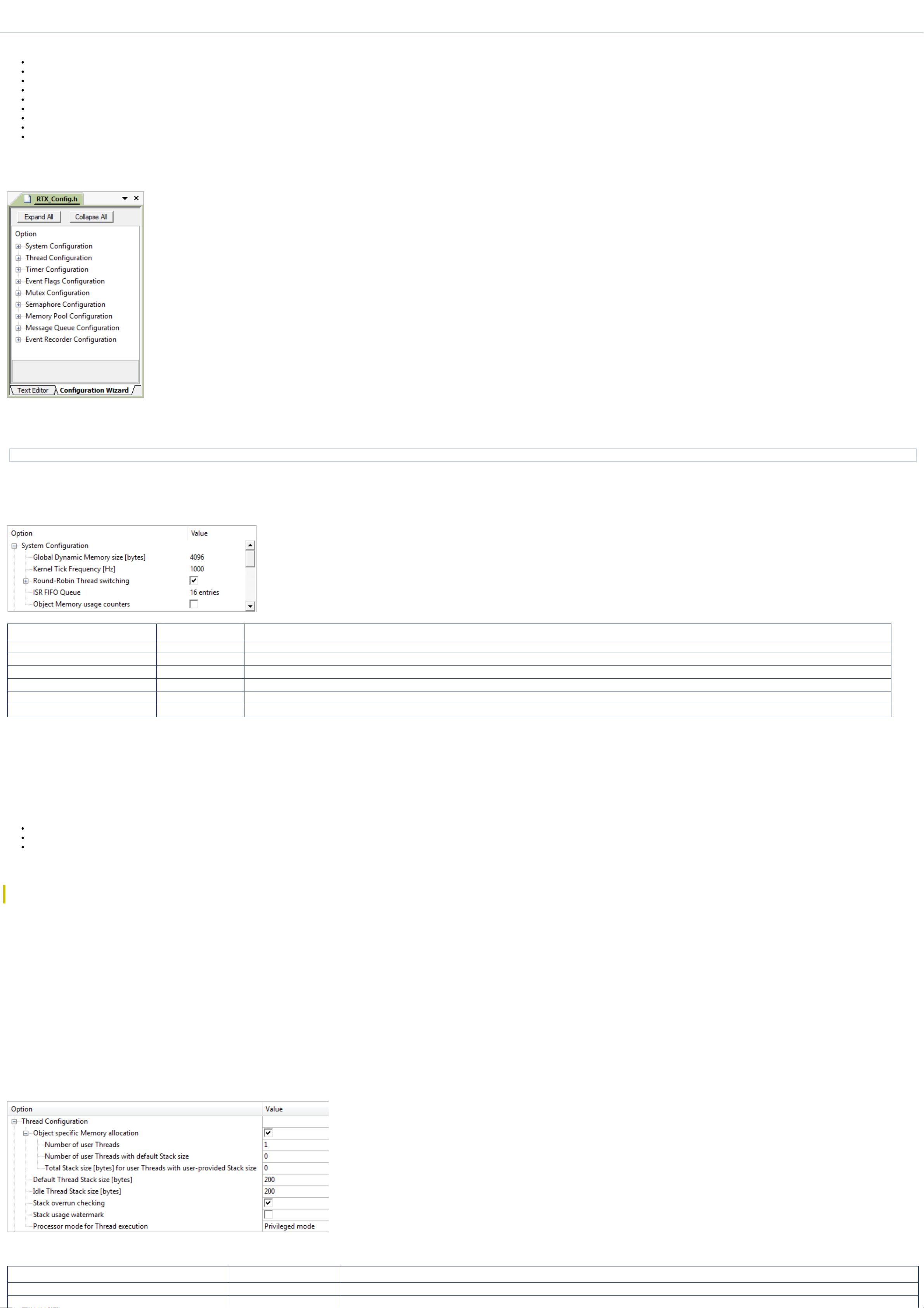
representation of the settings. The picture below shows the µVision Configuration Wizard view in MDK:
RTX_Config.h in Configuration Wizard View
Alternatively one can provide configuration options using the compiler command line.
For example one can customize the used tick frequency to 100us by (overwriting) the configuration using
cc -DOS_TICK_FREQ=100
System Configuration
The system configuration covers system-wide settings for the global memory pool, tick frequency, ISR event buffer and round-robin thread switching.
System Configuration Options
RTX_Config.h: System Configuration
Name #define Description
Global Dynamic Memory size [bytes]
OS_DYNAMIC_MEM_SIZE
Defines the combined global dynamic memory size for the Global Memory Pool. Default value is 4096. Value range is [0-1073741824] bytes, in multiples of 8 bytes.
Kernel Tick Frequency (Hz)
OS_TICK_FREQ
Defines base time unit for delays and timeouts in Hz. Default: 1000Hz = 1ms period.
Round-Robin Thread switching
OS_ROBIN_ENABLE
Enables Round-Robin Thread switching.
Round-Robin Timeout
OS_ROBIN_TIMEOUT
Defines how long a thread will execute before a thread switch. Default value is 5. Value range is [1-1000].
ISR FIFO Queue
OS_ISR_FIFO_QUEUE
RTOS Functions called from ISR store requests to this buffer. Default value is 16 entries. Value range is [4-256] entries in multiples of 4.
Object Memory usage counters
OS_OBJ_MEM_USAGE
Enables object memory usage counters to evaluate the maximum memory pool requirements individually for each RTOS object type.
Global dynamic memory
Refer to Global Memory Pool.
Round-Robin Thread Switching
RTX5 may be configured to use round-robin multitasking thread switching. Round-robin allows quasi-parallel execution of several threads of the same priority. Threads are not really executed concurrently, but are scheduled where the
available CPU time is divided into time slices and RTX5 assigns a time slice to each thread. Because the time slice is typically short (only a few milliseconds), it appears as though threads execute simultaneously.
Round-robin thread switching functions as follows:
the tick is preloaded with the timeout value when a thread switch occurs
the tick is decremented (if not already zero) each system tick if the same thread is still executing
when the tick reaches 0 it indicates that a timeout has occurred. If there is another thread ready with the same priority, then the system switches to that thread and the tick is preloaded with timeout again.
In other words, threads execute for the duration of their time slice (unless a thread's time slice is given up). Then, RTX switches to the next thread that is in READY state and has the same priority. If no other thread with the same
priority is ready to run, the current running thread resumes it execution.
Note
When switching to higher priority threads, the round-robin timeout value is reset.
Round-Robin multitasking is controlled with the #define OS_ROBIN_ENABLE. The time slice period is configured (in RTX timer ticks) with the #define OS_ROBIN_TIMEOUT.
ISR FIFO Queue
The RTX functions (Calls from Interrupt Service Routines), when called from and interrupt handler, store the request type and optional parameter to the ISR FIFO queue buffer to be processed later, after the interrupt handler exits.
The scheduler is activated immediately after the IRQ handler has finished its execution to process the requests stored to the FIFO queue buffer. The required size of this buffer depends on the number of functions that are called within the
interrupt handler. An insufficient queue size will be caught by osRtxErrorNotify with error code osRtxErrorISRQueueOverflow.
Object Memory Usage Counters
Object memory usage counters help to evaluate the maximum memory pool requirements for each object type, just like stack watermarking does for threads. The initial setup starts with a global memory pool for all object types.
Consecutive runs of the application with object memory usage counters enabled, help to introduce object specific memory pools for each object type. Normally, this is required for applications that require a functional safety certification as
global memory pools are not allowed in this case.
Thread Configuration
The RTX5 provides several parameters to configure the Thread Management functions.
Thread Configuration Options
RTX_Config.h: Thread Configuration
Option #define Description
Object specific Memory allocation
OS_THREAD_OBJ_MEM
Enables object specific memory allocation. See Object-specific Memory Pools.
Number of user Threads
OS_THREAD_NUM
Defines maximum number of user threads that can be active at the same time. Applies to user threads with system provided memory for control
下载后可阅读完整内容,剩余4页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2011-08-26 上传
2024-10-14 上传
2021-11-20 上传
2022-07-11 上传

MichaelNZ
- 粉丝: 6
- 资源: 43
 我的内容管理
展开
我的内容管理
展开







最新资源
- Raspberry Pi OpenCL驱动程序安装与QEMU仿真指南
- Apache RocketMQ Go客户端:全面支持与消息处理功能
- WStage平台:无线传感器网络阶段数据交互技术
- 基于Java SpringBoot和微信小程序的ssm智能仓储系统开发
- CorrectMe项目:自动更正与建议API的开发与应用
- IdeaBiz请求处理程序JAVA:自动化API调用与令牌管理
- 墨西哥面包店研讨会:介绍关键业绩指标(KPI)与评估标准
- 2014年Android音乐播放器源码学习分享
- CleverRecyclerView扩展库:滑动效果与特性增强
- 利用Python和SURF特征识别斑点猫图像
- Wurpr开源PHP MySQL包装器:安全易用且高效
- Scratch少儿编程:Kanon妹系闹钟音效素材包
- 食品分享社交应用的开发教程与功能介绍
- Cookies by lfj.io: 浏览数据智能管理与同步工具
- 掌握SSH框架与SpringMVC Hibernate集成教程
- C语言实现FFT算法及互相关性能优化指南
