ROS入门指南
需积分: 25 170 浏览量
更新于2024-07-22
收藏 1.43MB PDF 举报
"ROS入门指南"
《ROS入门指南》是一本由Jason M. O'Kane编写的关于Robot Operating System(ROS)的书籍,主要面向初学者,旨在介绍ROS的基础知识和使用方法。ROS是一个开源操作系统,专为机器人系统设计,提供了一个框架来处理机器人硬件接口、软件组件以及数据通信。
在书中的“Introduction”部分,作者引入了ROS的概念,并解释了它在机器人开发中的重要性。这部分内容可能会涵盖ROS的核心设计理念,如模块化、可扩展性和跨平台特性,以及如何利用ROS来简化机器人软件的开发和集成。
“Getting started”章节则指导读者安装ROS并了解其基础概念。这包括设置开发环境,启动ROS工作空间,以及如何与ROS节点进行基本交互,如运行简单的命令和使用终端工具。
“Writing ROS programs”章节深入到ROS编程实践,讲解如何编写发布和订阅消息的节点。ROS的消息传递机制是其核心功能之一,这部分将涉及创建ROS消息类型,编写发布者和订阅者节点,以及使用ROS的通信中间件(如Rosbag和rosnode)进行数据交换。
“Log messages”章节则讨论了ROS的日志系统,包括如何生成和查看日志信息。日志对于调试和监控ROS系统的运行状态至关重要,作者会解释如何配置日志级别和使用相关工具分析日志数据。
“Graph resource names”章节介绍了ROS的命名规则,即如何解析节点、主题、参数和服务的名称。ROS使用全局名称空间来管理这些资源,理解这一机制对于正确地连接和通信至关重要。
“Launch files”章节涵盖了ROS的启动文件(launch files),这是一种批量配置和启动多个节点的工具。通过学习这部分,读者可以学会如何编写launch文件来组织复杂的系统配置,并实现一键启动。
“Parameters”章节关注ROS的参数系统,它允许动态配置节点的行为。这部分将教授如何设置和获取参数,以及参数服务器在系统中的作用。
最后,“Services”章节讲解了ROS的服务,这是节点间进行有应答通信的一种方式。服务可以用于执行一次性任务,如获取位置信息或执行控制操作。
总体来说,这本书提供了全面的ROS入门教程,涵盖了从安装、编程、调试到系统配置的各个方面,对于想要学习和理解ROS的读者来说是一份宝贵的资源。
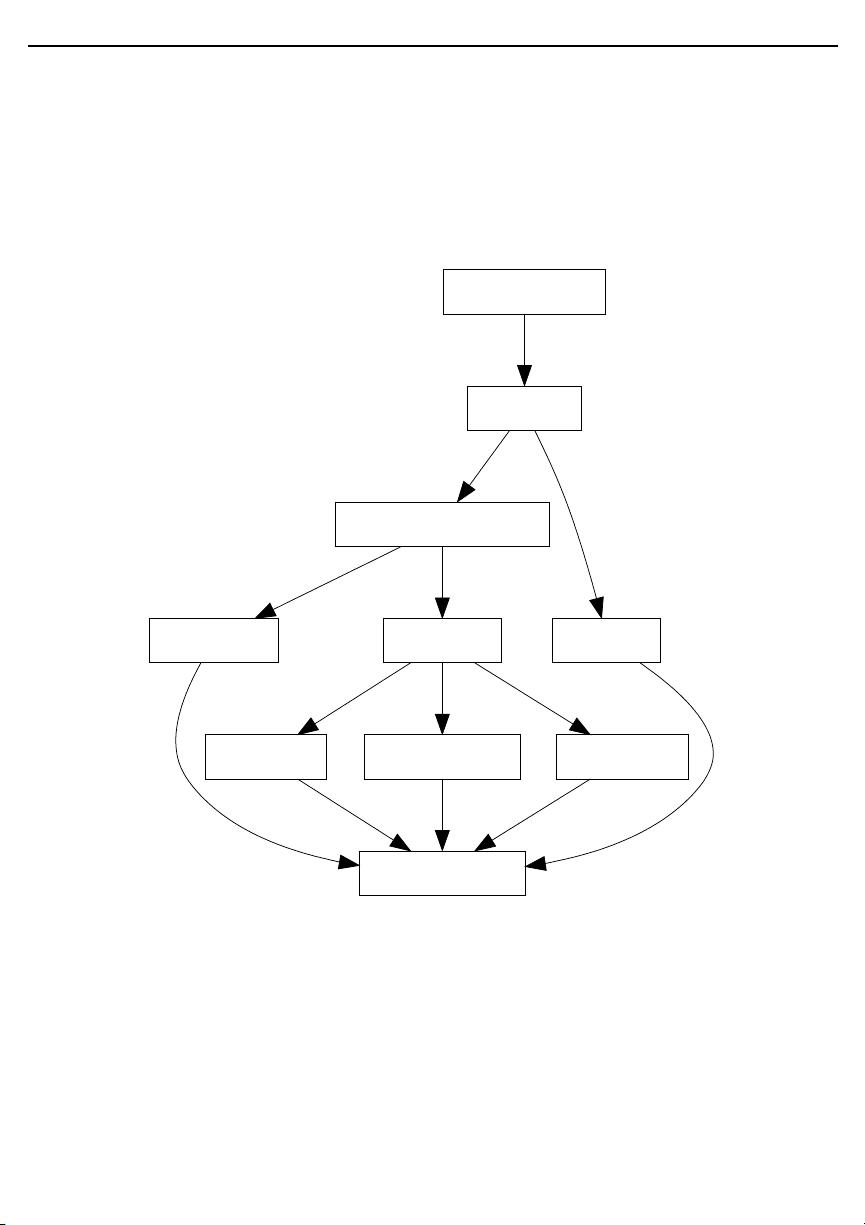
1. INTRODUCTION
1. Introduction
2. Basics
3. Publish/Subscribe
9. Bags4. Logging 5. Names
10. Conclusion
6. Launch 7. Parameters 8. Services
Figure 1.1: Dependencies between chapters.
6


剩余165页未读,继续阅读
171 浏览量
153 浏览量
2016-12-23 上传
146 浏览量
191 浏览量

qq_24189139
- 粉丝: 0
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







