电机控制:PI参数整定在电流环与转速环的应用
下载需积分: 5 | DOCX格式 | 356KB |
更新于2024-08-05
| 6 浏览量 | 举报
"电机控制 PI参数整定 矢量控制 FOC 电流环 转速环"
在电机控制领域,KIP KII的计算方法是针对PI控制器参数整定的一种技术,它与TI公司的相关讲座相类似。PI控制器是电机控制中最常见的调节器类型,尤其在电流环和转速环的控制中发挥着关键作用。本资源主要讨论了如何通过这种方法优化电机驱动的性能,特别是在电流环调试中,能够显著提升效果。
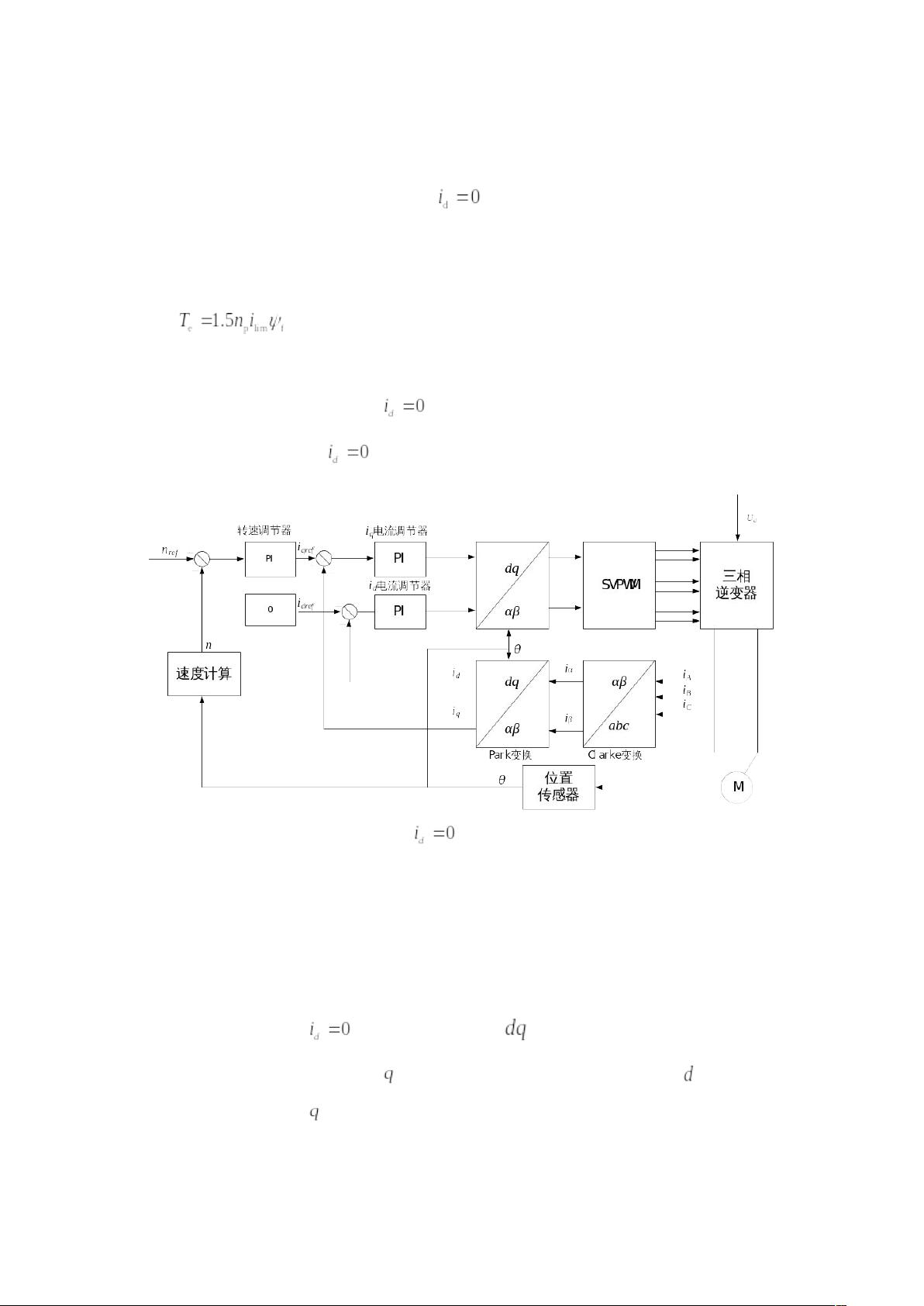
PI调节器参数整定的理论基础来源于电机的转矩公式。在特定条件下,永磁同步电机可以被视为直流电动机,此时电磁转矩只依赖于交轴电流,实现了电流解耦,简化了控制策略。矢量控制(FOC,Field-Oriented Control)利用这一特性,采用双闭环控制策略,即电流内环和转速外环,如图1-1所示。
电流调节器的参数整定是关键步骤之一。由于轴电流内环的对称性和相似系统特性,我们可以专注于一个轴的分析。考虑到PWM控制和采样周期的影响,轴电流环的简化结构可以用于计算PI参数。通过开环和闭环传递函数的分析(式1.1至1.6),可以确定在阻尼比最优时的PI参数设置,以确保系统的稳定性和响应速度。
转速调节器的参数整定同样重要。转速环近似控制框图(图1-4和1-5)显示了负载转矩作为扰动引入的情况。通过合并电流内环和速度信号采样时间常数,我们可以计算出转速外环的开环传递函数和中频带宽。对于典型的Ⅱ型系统,中频带宽的选择直接影响系统的响应速度和抗干扰能力。在实际应用中,通常会选择一定的中频带宽值,如式1.9所示,来设定PI参数。
KIP KII的计算方法提供了电机控制中PI参数整定的详细指导,适用于单片机等硬件平台上的电机驱动设计。通过对电流环和转速环的精确控制,可以提高电机的效率和动态性能,是电机控制工程师的重要参考资料。
1 PI 调节器参数整定
根据电机的转矩公式可以得知, 时,从电动机端口看,永磁同步电动
机相当于一台他励的直流电动机,定子电流中只有交轴分量,且定子磁动势空
间矢量与永磁体磁动势空间矢量正交,电动机转矩中只有永磁转矩分量,其大
小为 。因为电磁转矩仅仅依赖于交轴电流,从而实现了转矩表达
式中的交、直轴电流解耦。这种控制方法最为简单且在工程中较容易实现,对
于隐极式永磁同步电机而言, 的方式是最大转矩电流比的工作状态。
矢量控制系统采用 双闭环控制策略,其整体结构框图如图 3-1 所示:
图 1-1 控制结构框图
系统中电流内环和转速外环均采用传统的 PI 调节器控,下面简要介绍各 PI
调节器参数整定方法。
1.1 电流调节器的参数整定
由于本文采用的 的控制方法,由于 轴电流内环具有对称性和具有
相似的系统特性,下面仅分析 轴电流 PI 调节器的参数整定方法, 轴电流 PI
调节器的参数整定和 轴类似。
下载后可阅读完整内容,剩余4页未读,立即下载
相关推荐







eric_123321
- 粉丝: 22
 我的内容管理
展开
我的内容管理
展开







最新资源
- Ruby语言集成Mandrill API的gem开发
- 开源嵌入式qt软键盘SYSZUXpinyin可移植源代码
- Kinect2.0实现高清面部特征精确对齐技术
- React与GitHub Jobs API整合的就业搜索应用
- MATLAB傅里叶变换函数应用实例分析
- 探索鼠标悬停特效的实现与应用
- 工行捷德U盾64位驱动程序安装指南
- Apache与Tomcat整合集群配置教程
- 成为JavaScript英雄:掌握be-the-hero-master技巧
- 深入实践Java编程珠玑:第13章源代码解析
- Proficy Maintenance Gateway软件:实时维护策略助力业务变革
- HTML5图片上传与编辑控件的实现
- RTDS环境下电网STATCOM模型的应用与分析
- 掌握Matlab下偏微分方程的有限元方法解析
- Aop原理与示例程序解读
- projete大语言项目登陆页面设计与实现
