动态规划与最优控制第三版
需积分: 9 130 浏览量
更新于2024-07-23
收藏 1.57MB PDF 举报
"《动态规划第三版》是Dimitri P. Bertsekas撰写的一本关于动态规划和最优控制的著作,由Athena Scientific出版社出版。这本书详细探讨了动态规划这一数学优化方法及其在最优控制问题中的应用。"
动态规划(Dynamic Programming)是一种解决最优化问题的数学方法,它通过将复杂问题分解为更小的子问题来求解。这个概念最初由Richard Bellman在20世纪50年代提出,主要用于处理多阶段决策过程中的优化问题。在《动态规划第三版》中,作者Dimitri P. Bertsekas深入浅出地介绍了这一领域的核心理论和实践应用。
书的内容可能涵盖了以下几个方面:
1. **基础理论**:包括动态规划的基本概念、基本方程(如Bellman方程)以及状态转移和决策过程的描述。这部分会解释如何定义状态空间、动作空间、奖励函数和策略,并介绍如何用动态规划求解这些问题。
2. **离散时间与连续时间动态规划**:离散时间动态规划适用于离散时间步长的决策问题,而连续时间动态规划则处理时间连续的情况。书中可能详细讨论了这两种情况下的最优控制问题,包括动态规划算法的设计和分析。
3. **数值方法**:动态规划通常涉及大量的计算,因此书中可能会介绍各种数值方法,如迭代算法、价值迭代、策略迭代和线性规划等,用于近似求解大规模或高维度问题。
4. **应用案例**:书中可能包含各种实际应用示例,如资源分配、项目调度、网络优化、机器人路径规划和经济模型等,这些案例有助于读者理解动态规划的实际应用和价值。
5. **最优控制理论**:最优控制是动态规划的一个重要应用领域,书中可能涵盖了LQR(线性二次调节器)、HJB(Hamilton-Jacobi-Bellman)方程等相关理论,以及它们在控制系统设计中的应用。
6. **扩展主题**:除了基础内容外,第三版可能还包含了最新的研究成果和技术,比如与随机动态规划、部分观察的马尔科夫决策过程(POMDPs)或强化学习的联系。
7. **附录和索引**:为了便于查阅,书中可能包含了详细的参考文献、数学公式解析和一个全面的索引,方便读者深入研究特定主题。
Dimitri P. Bertsekas是一位在系统科学和优化领域有着深厚造诣的学者,他的作品通常以其严谨的数学表述和丰富的实例解析而受到赞誉。通过阅读这本书,读者可以系统地学习动态规划,并将其应用于实际的最优化问题中。
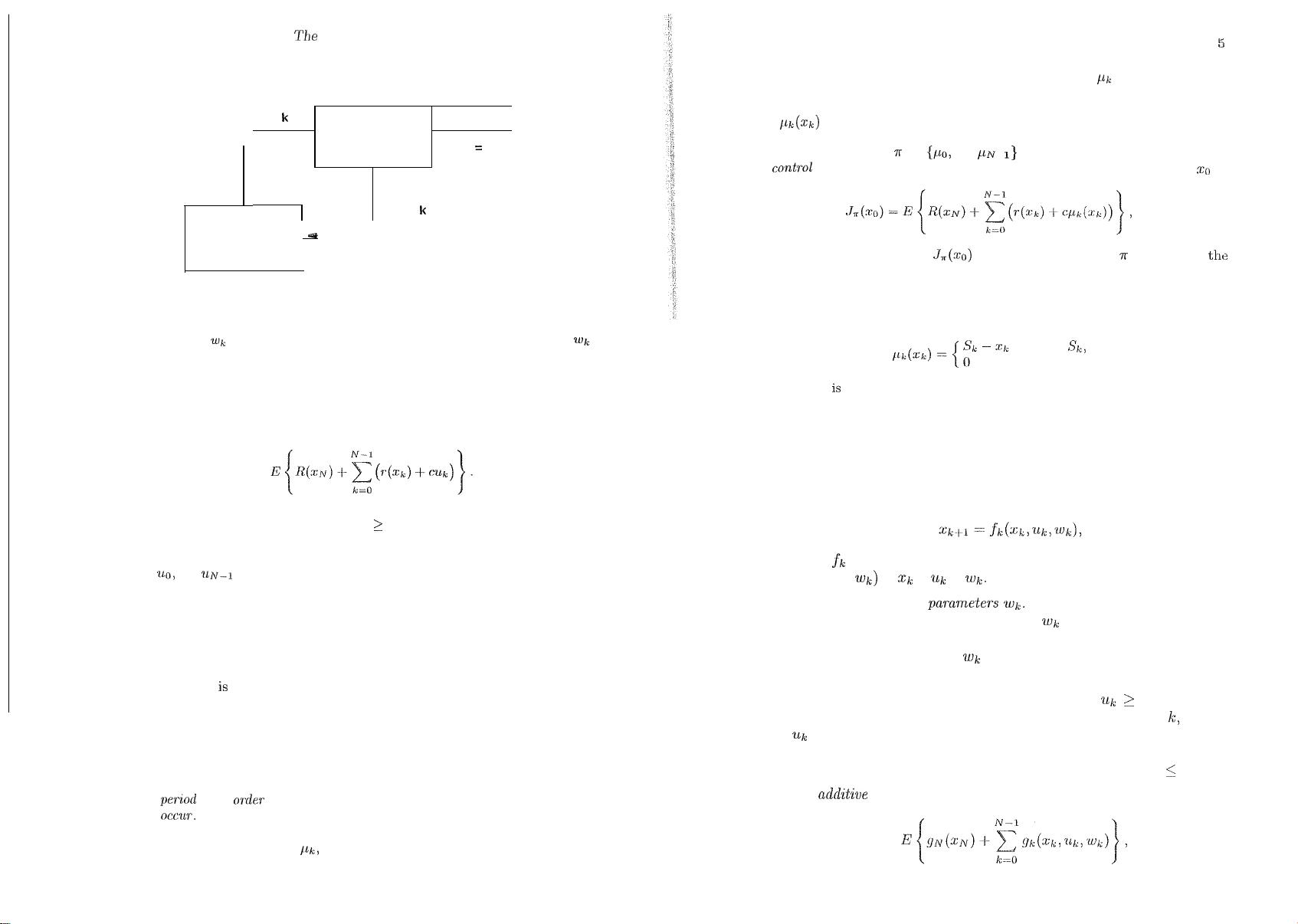
Figure
1.1.1
Inventory
control
example.
At
period
k,
the
current
stock
(state)
x
k,
the
stock
ordered
(control)
Uk,
and
the
demand
(random
distur-
bance)
'Wk
determine
the
cost
r(xk)+cUk
and
the
stock
Xk+1
=
Xk
+Uk
'Wk
at
the
next
period.
1-
.........
---
Uk
5
if
Xk
<
Eh,
otherwise,
Introduction
/tk(Xk)
=
amount
that
should
be
ordered
at
time
k if
the
stock
is
Xk.
and
we
want
to
minimize
J1t"(xo)
for a given
Xo
over all
'if
that
satisfy
the
constraints
of
the
problem.
This
is a
typical
dynamic
programming
problem.
We
will
analyze
this
problem
in
various
forms
in
subsequent
sections.
For
example,
we will show
in
Section
4.2
that
for a
reasonable
choice
of
the
cost
function,
the
optimal
ordering
policy is of
the
form
The
sequence
'if
{{to,
...
,
jlN
-
I}
will
be
referred
to
as a policy
or
contr-ol law.
For
each
'if,
the
corresponding
cost
for a fixed
initial
stock
:ro is
so
as
to
minimize
the
expected
cost.
The
meaning
of
jlk
is
that,
for
each
k
and
each
possible value
of
Xk,
Sec. 1.1
Chap.
1
dk+1
The
Dynamic
Programming
Algorithm
Wk
IDemand
at
Period k
eriod
I<
Stocl<
at
Perio
Inventory System
Xk+ 1 =
Xk
+
Stock ordered at
Period
I<
Stocl< at P
xk
Cost of Penod k
r(xk) +
CUI<
(b)
The
purchasing
cost
C'Uk,
where
c is
cost
per
unit
ordered.
There
is also a
terminal
cost
R(XN) for
being
left
with
inventory
XN
at
the
end
of
N
periods.
Thus,
the
total
cost over N
periods
is
where
Sk
is a
suitable
threshold
level
determined
by
the
data
of
the
problem.
In
other
words,
when
stock
falls
below
the
threshold
Sk,
order
just
enough
to
bring
stock
up
to
Sk.
We
want
to
minimize
this
cost
by
proper
choice
of
the
orders
Uo,
...
,
UN-I,
subject
to
the
natural
constraint
Uk
2::
0 for all k.
At
this
point
we
need
to
distinguish
between
closed-loop
and
open-
loop
minimization
of
the
cost.
In
open-loop
minimization
we select all
orders
Uo,
...
,
UN-I
at
once
at
time
0,
without
waiting
to
see
the
subsequent
demand
levels.
In
closed-loop
minimization
we
postpone
placing
the
order
Uk
until
the
last
possible
moment
(time
k)
when
the
current
stock
Xk
will
be
known.
The
idea
is
that
since
there
is
no
penalty
for
delaying
the
order
Uk
up
to
time
k,
we
can
take
advantage
of
information
that
becomes
available
between
times
o
and
k
(the
demand
and
stock
level
in
past
periods).
Closed-loop
optimization
is
of
central
importance
in
dynamic
program-
ming
and
is
the
type
of
optimization
that
we will
consider
almost
exclusively
in
this
book.
Thus,
in
our
basic
formulation,
decisions
are
made
in
stages
while
gathering
information
between
stages
that
will
be
used
to
enhance
the
quality
of
the
decisions.
The
effect
of
this
on
the
structure
of
the
resulting
optimization
problem
is
quite
profound.
In
particular,
in
closed-loop inven-
tory
optimization
we
are
not
interested
in
finding
optimal
numerical
values
of
the
orders
but
rather
we
want
to
find
an
optimal rule
for
selecting at each
pe'f'iod k
an
o'f'der
Uk
for
each possible value
of
stock
Xk
that
can conceivably
occur-.
This
is
an
"action
versus
strategy"
distinction.
Mathematically,
in
closed-loop
inventory
optimization,
we
want
to
find
a
sequence
of
functions
Itk,
k = 0,
...
,N
- 1,
mapping
stock
Xk
into
order
Uk
The
preceding
example
illustrates
the
main
ingredients of
the
basic
problem
formulation:
(a)
A
discrete-time
system
of
the
form
where
!k
is some function; for
example
in
the
inventory case, we have
fk(Xk,
Uk,
'Wk)
=
Xli:
-I-
'ILk
-
'Wk·
(b)
Independent
random
parame"ters
'Wk.
This
will
be
generalized
by
al-
lowing
the
probability
distribution
of
'Wk
to
depend
on
Xk
and
Uk;
in
the
context
of
the
inventory example, we
can
think
of a
situation
where
the
level of
demand
'Wk
is influenced by
the
current
stock
level
Xk·
(c) A control constraint; in
the
example,
we have 'Uk
~
O.
In
general,
the
constraint
set
will
depend
on
Xk
and
the
time
index
k,
that
is,
'Uk E
Uk(Xk).
To see how
constraints
dependent
on
Xk
can
arise
in
the
inventory
context,
think
of a
situation
where
there
is
an
upper
bound
B
on
the
level of
stock
that
can
be
accommodated,
so
Uk
~
B
Xk.'
(d)
An
addit'lve cost
of
the
form
剩余46页未读,继续阅读
2022-12-09 上传
219 浏览量
2008-08-30 上传
105 浏览量
133 浏览量
2014-12-16 上传
116 浏览量
159 浏览量
2010-01-07 上传

ljl199141
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 记忆翻牌小游戏
- PC微信加密图片解密源码C#
- product-register
- ManagmentPlugin:用于管理Mindustery服务器的插件
- 图像去噪,中值,均值,双边,高斯,FFC-MSPCNN
- 行业文档-设计装置-隧道施工二衬环向钢筋步进排布装置.zip
- C# OpenCvSharp 去除字母后面的杂线 源码
- MyReactProject
- datafrog-旨在嵌入其他Rust程序的轻量级Datalog引擎-Rust开发
- U大师U盘启动盘制作工具 v1.2.0 超微版
- SassPipeline
- WordPress v5.2 RC2
- 每晚amadeus-Rust中的和谐分布式数据处理和分析。 实木复合地板postgres aws s3 cloudfront elb json csv日志hadoop hdfs箭头常见爬网-Rust开发
- 龙格库塔解微分方程,龙格库塔解微分方程组,matlab
- com.atomist:我的新项目
- Javascript_001
