毫米波雷达在自动驾驶中的关键技术与设计要点详解
需积分: 3 173 浏览量
更新于2024-08-04
收藏 2.66MB PDF 举报
自动驾驶毫米波雷达是现代智能汽车安全和导航系统中的重要组成部分,它通过利用毫米波频段的无线电信号来实现对周围环境的高精度感知。本文主要关注以下几个关键技术和设计要点:
1. **检测范围 (Detection Range)**:毫米波雷达的核心功能之一是提供远距离的物体检测能力,这对于自动驾驶至关重要。设计时需确保足够的探测范围,以便车辆能识别到潜在障碍物,如车辆、行人(VRU)等。
2. **视场角 (Field of View, FoV)**:毫米波雷达的视场角决定了其覆盖范围和对周围环境的理解程度。高分辨率的FoV有助于实现车道级探测精度,确保在复杂道路条件下能够准确识别车道线、其他车辆和静态或动态障碍物。
3. **高分辨率 (High Resolution)**:包括方位(Azimuth)和俯仰(Elevation)分辨率,这直接影响雷达对目标位置的精确度,对于车道保持辅助系统(LCA)、高速公路辅助驾驶(Highway Pilot)等高级功能至关重要。
4. **多重功能集成 (BSD, DOW, RCTA/B, LCA, HWA, PA, FCTA, HWP, TJA, ACC, FCW, AEB, RCW)**:这些缩写代表了一系列先进的驾驶辅助功能,如盲点监测(BSD)、车道偏离警告(DOW)、后方碰撞预警(RCTA/B)、前方碰撞预警(FCW)、自动紧急制动(AEB)、环绕摄像头(RCW)等,要求雷达能够集成并提供这些功能的实时数据支持。
5. **硬件演进 (Radar HWEvolution)**:毫米波雷达硬件的发展趋势包括增加通道数、采用MMIC(混合信号集成电路)元件以提升数据处理能力,以及通过MCU(微控制器)和FPGA(现场可编程门阵列)优化算法性能。未来的雷达可能会采用更高性能的3T4R/4T4Rx MMIC数量,以实现更强大的探测威力和角度分辨率。
6. **成本效益 (BOM Cost)**:在设计阶段,必须考虑雷达系统的制造成本,包括元器件价格、模块化和集成度,以确保技术先进性和经济合理性之间的平衡。
7. **散热管理 (Heatsink)**:毫米波雷达工作时会产生热量,因此良好的散热设计是必要的,文中提到的NXP TEF82XX可能是一款用于散热的解决方案。
8. **波束形成 (Beamforming)**:通过精确控制天线波束,可以增强特定方向的接收能力,提高测角精度和感知灵敏度,并支持对象分类和多维度角度分辨率,这对于在不同场景下提供最佳性能至关重要。
9. **尺寸与性能优化 (Size and Performance)**:设计者需要在尺寸紧凑性(如100x100x30mm)和性能指标(如Lsys下降3dB,Rmax提升20%)之间找到最佳平衡,同时保持方位和俯仰角度的精度。
10. **自动校准 (Autocalibration)**:为了保证长期稳定运行,雷达需要具备自动校准功能,以补偿因温度变化等因素引起的性能变化。
自动驾驶毫米波雷达的设计需综合考虑多个关键要素,以满足日益增长的安全需求,提升自动驾驶的可靠性和用户体验。随着技术的不断进步,雷达性能将持续提升,为智能交通系统提供更加全面和精确的环境感知能力。
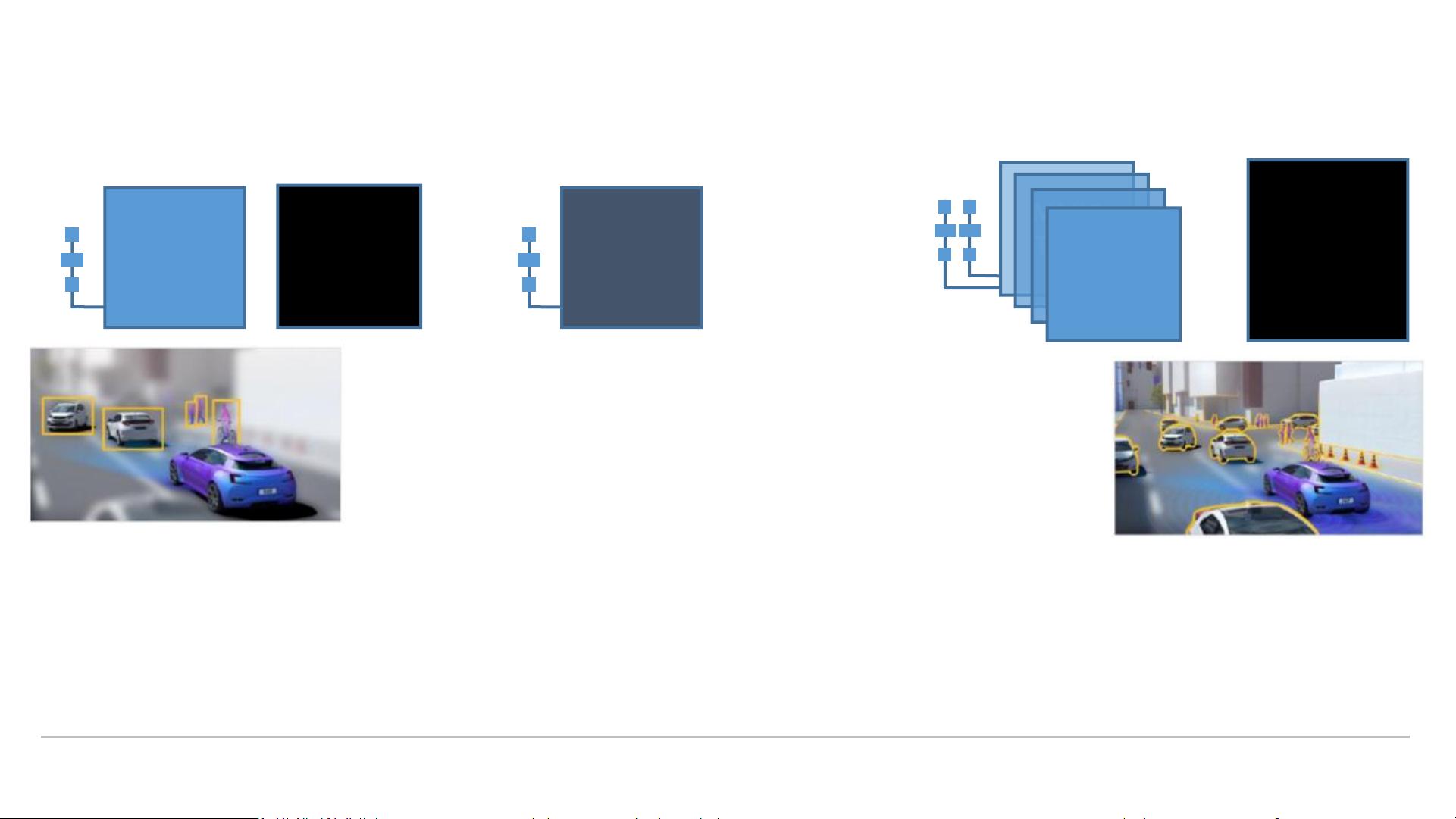
毫米波雷达硬件演进
Radar HW Evolution
BOM cost
Channel number
Azi. resolution
Ele. resolution
MMIC
Tx/Rx
MCU/
FPGA
MMIC
Tx/Rx
MMIC
Tx/Rx
MMIC
Tx/Rx
MMIC
Tx/Rx
MCU
CURRENT
MMIC
Tx/Rx
MCU
FUTURE
HIGH
3T4R/4T4R x MMIC number
HIGH
MEDIUM / HIGH
LOW
.../2T4R/3T4R
LOW / MEDIUM
NONE / LOW
雷达需要更强的探测威力和更高的角度分辨
3
n 检测机动车,VRU
n 车道级探测精度
n NCAP(AEB、BSD等)
n 360°感知(Cocoon Radar)
n 方位、俯仰高精度、高分辨
n 弱目标(路障、路沿)探测
n 自动变道、自动泊车、环境地图等
剩余13页未读,继续阅读
2023-03-27 上传
2021-09-29 上传
2023-07-21 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

海恋星空
- 粉丝: 1
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- morphline-mr:MapReduce 与 Kite Morphline
- RestApi:laravel学习
- Laravel:Laravel框架5.7.29
- 围攻塔:sgdvxdrfgdrgdr
- MightyCal: Zope/Cocoon Calendar Product-开源
- Android-Project-01
- 用JavaScript路由正交图连接器
- Compiler
- 行业分类-设备装置-跨平台的多屏互动方法、装置及系统.zip
- qnotify:发送2b2t队列通知到电话!
- personaApp
- Bots:只是我所有机器人的一个项目
- Food_Website:响应式食品网站
- bbdoc64V112.zip
- crudASP
- python-LRU缓存.zip
