西电屈胜利老师系统仿真的MATLAB作业详解:Bode图与根轨迹分析
需积分: 12 112 浏览量
更新于2024-07-25
收藏 872KB DOC 举报
在西安电子科技大学的系统仿真实验课中,学生们被布置了一项大作业,由屈胜利老师指导。作业内容涉及计算机辅助系统分析,具体是一个动态系统的建模与分析。系统包含一个单位阶跃输入和一个非线性器件,其传递函数可以表示为G(s) = 40(1 + s)/s(10s + 1)(0.625s + 1)(0.025s + 1)。
首先,学生需要使用MATLAB软件来绘制系统的开环Bode图,该图展示了系统的频率响应特性,包括幅值(Magnitude)和相位(Phase)。通过执行`bode(num, den)`命令,其中`num`和`den`分别是系统的分子和分母多项式,得到的参数包括增益裕量Gm=4.3168、相位裕量Pm=10.0158、穿越频率Wcg=5.1598以及增益为0的频率Wcp=2.3975。这些参数帮助分析系统的稳定性与动态性能,特别是稳态误差和快速响应时间。
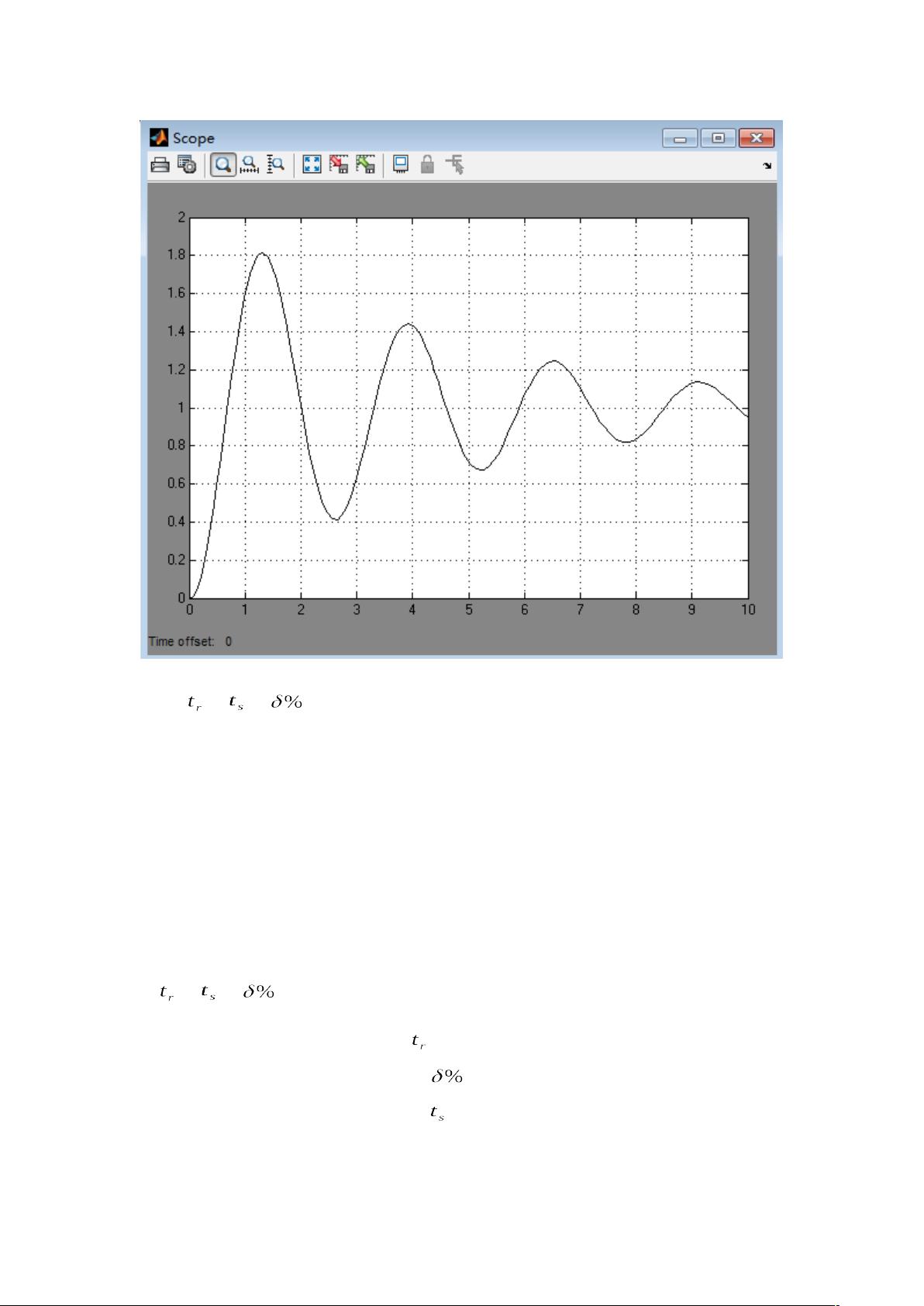
进一步的分析要求计算上升时间rise_time=0.7772秒,最大超调(max_overshoot)=81.68%,以及settling_time=17.0985秒,这代表了系统的响应速度和收敛特性。这些数值表明系统在阶跃输入下的行为,上升时间和超调率是衡量系统快速响应的重要指标,而settling_time则反映系统稳定达到稳态的时间。
接下来的挑战是当输入变为单位斜坡时,学生需要绘制系统的根轨迹图。根轨迹图显示了闭环系统在复平面上的极点分布,这对于理解系统在不同参数变化下的稳定性至关重要。在MATLAB中,可以使用`rlocus(num, den)`命令绘制根轨迹。同时,学生需要找出当某特定频率时的闭环极点,借此推测系统的动态响应特性和可能的性能限制。
最后,通过对系统的深入分析,学生能够估计出系统的暂态响应时间、超调幅度以及闭环系统的稳定区域,这些都是系统仿真的核心概念,对于理解和优化实际控制系统的设计有着重要的实践意义。通过这个大作业,学生不仅掌握了MATLAB工具的运用,还提升了对系统理论的理解和分析能力。
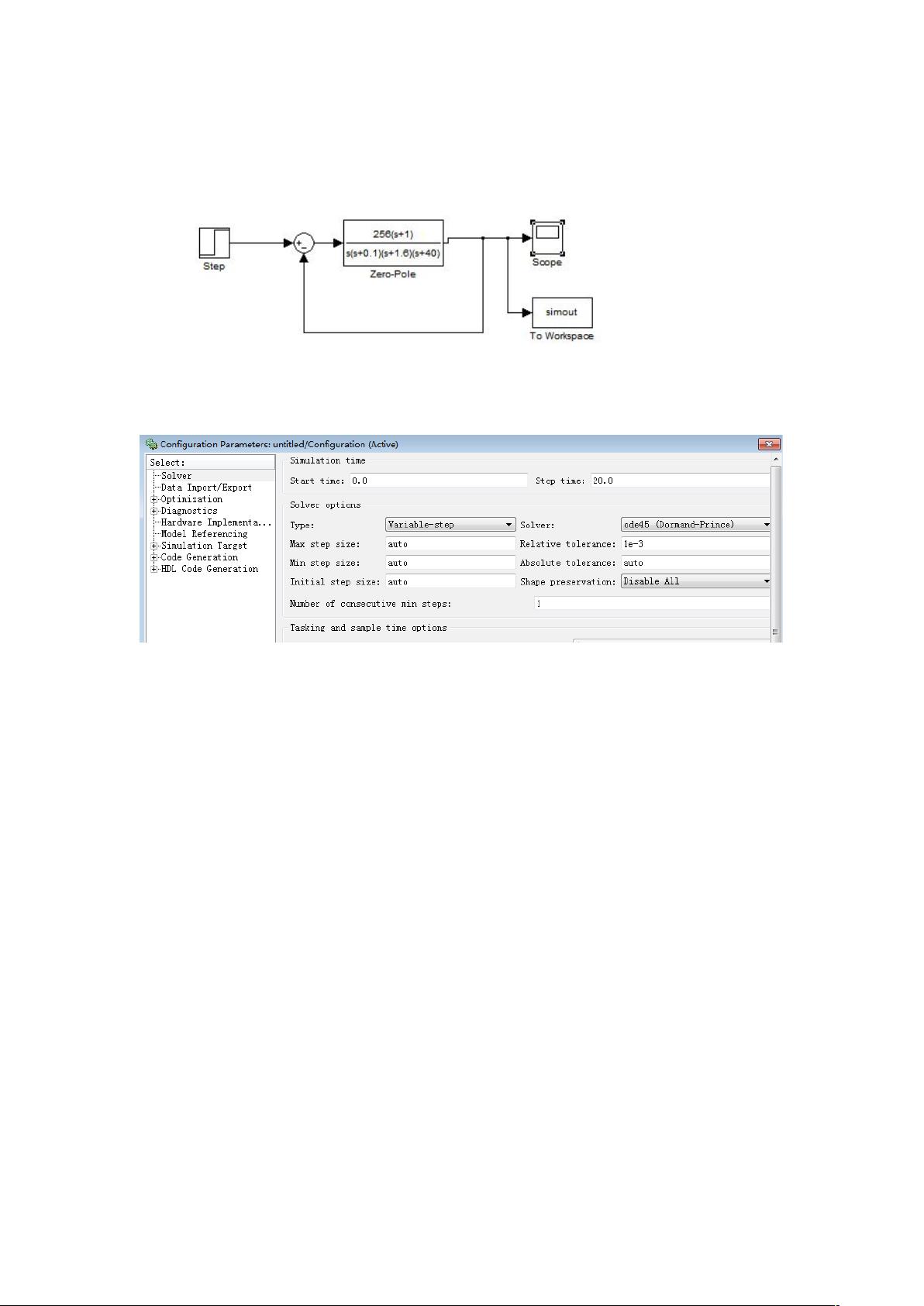
自适应变步长
仿真波形
剩余25页未读,继续阅读
点击了解资源详情
148 浏览量
173 浏览量
155 浏览量
148 浏览量
1105 浏览量
460 浏览量
2022-08-25 上传
524 浏览量

zhaowei19920524
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Gitolite: Git服务器的简易SSH部署方案
- C++课程设计实战:星球大战游戏开发
- PCLPython绑定发布:点云处理的新选择
- ExtJS3.2.1实现Grid中图片的添加技巧
- Nacos2.1.1与达梦数据库的Windows集成方案
- 实时声音信号采集与WAV文件格式储存技术
- 614V9设备成砖修复及固件更新解决方案
- 深入浅出Go语言设计模式
- JSON格式化工具:轻松查看和编辑JSON文件
- 初学者参考:11页CSS+JavaScript网站制作教程
- 轻量级HTTP服务器:GCDWebServer开源库介绍
- AGV固态模型示意结构深度解析
- 跨平台通用AES加密技术实现与应用
- eNSP企业网络课程设计:全网互通与远程管理
- FNN模型应用分析:UCSF数据预处理与仿真计算
- VB开发的机房预约系统,便捷管理实验课安排
