选择性对抗灰狼优化算法:增强探索与快速收敛
需积分: 5 184 浏览量
更新于2024-08-03
收藏 3.73MB PDF 举报
"这篇论文提出了一种新的优化算法——选择性对抗灰狼优化(Selective Opposition based Grey Wolf Optimization, SO-GWO),将对立面学习(OBL)融入灰狼优化算法(GWO)中,以提高其探索性能,同时保持快速收敛速度。通过对Spearman相关系数的运用,确定低级灰狼(ω狼)在哪些维度上进行对立学习,以避免无效探索,实现在不影响找到最优解可能性的情况下快速收敛。该方法经过23个优化函数的测试验证,结果表明其优越性。"
本文关注的是优化算法领域的创新,特别是针对元启发式算法的应用。灰狼优化算法(GWO)是一种新兴且受欢迎的优化工具,它模拟了灰狼群体中的狩猎行为来解决复杂问题。然而,GWO在搜索空间的探索和收敛速度之间可能存在平衡问题。为了解决这个问题,作者提出了选择性对抗策略,将对立面学习(OBL)的概念与GWO相结合。
对立面学习是一种通过创建并利用问题解的对立版本来促进算法探索的技术。在SO-GWO中,不是对所有维度进行对立学习,而是有选择地在某些维度上应用,这减少了不必要的计算开销,有助于更快地收敛到潜在的最优解。Spearman相关系数在这里起到了关键作用,它用于判断哪只“ω狼”(灰狼群中社会等级最低的狼)应该在哪一维度上进行对立学习,以最大化优化效果。
文章经过了一系列的测试,使用了23个不同的优化函数来评估新算法的性能。对比研究表明,SO-GWO在处理这些函数时表现出了更优的性能,证明了该方法的有效性和潜力。这对于优化问题,特别是在制造业、人工智能和优化研究等领域具有重要意义,因为这些领域经常需要解决复杂的优化挑战。
SO-GWO算法是灰狼优化算法的一种改进,通过引入选择性对抗学习,增强了算法的探索性,提高了收敛速度,并在实际问题中展现出优越的优化能力。这一方法对于未来优化算法的设计和改进提供了新的思路。
S. Dhargupta, M. Ghosh and S. Mirjalili et al. / Expert Systems With Applications 151 (2020) 113389 3
of cell roles (proliferative, quiescent, dying and invasive) and five
types of search rules (growth of all four types of cells and random
walk for all of them) have been presented.
EAs have emerged as a very robust and practical search method
for global optimum. In the last few years, numerous algorithms
have been proposed in the literature. EA generally works through
use of three general procedures namely selection, crossover and
mutation. Besides GA, Differential Evolution (DE) is another popu-
lar approach for solving nonlinear and non-differentiable optimiza-
tion problems. Though it has good exploration ability, it lacks ex-
ploitation capacity. Also, DE requires problem-specific parameter
setting. Evolutionary Programming (EP) allows the structure of the
optimizing program to be fixed to evolve the parameters. On the
other hand, Evolution Strategy (ES) primarily uses mutation and
selection as search operators.
Many techniques have been proposed for the improvement of
these metaheuristics. Some of these techniques include the use of
OBL, chaos, hybridization and so on. The No Free Lunch theorem
( Wolpert & Macready, 1997 ) has kept research in this field alive.
Of these techniques, a popular and effective one is OBL ( Tizhoosh,
2005 ). OBL algorithms have attracted the interests of numerous
computer scientists in the past years. Many of the previously dis-
cussed algorithms such as GSA, SA , GA , PSO, ACO, ABC, DE etc. have
been enhanced by the application of OBL on them ( Mahdavi, Rah-
namayan, & Deb, 2018 ).
Ergezer and Simon (2014) have introduced fitness-based quasi-
reflection concept, where relative fitness of candidate solutions is
used to generate new candidates. Their paper has presented re-
sults considering one dimensional search space but it can further
be extended to higher dimensional space. Liu et al. (2014) have
proposed an Opposite Center Learning (OCL), where they have
defined opposite point as the optimum solution among a pair-
wise sampling of search space given a random initial point. This
method accelerates the convergence of population-based search al-
gorithms. Rahnamayan, Jesuthasan, Bourennani, Salehinejad, and
Naterer (2014) have suggested an Oppositional Target-Domain Es-
timation (OTDS) where they divided the search space into grids,
making the estimation of the target domain faster. However, the
computational complexity increases if the solution lies adjacent to
a grid border.
Literature survey reveals that there are only few works avail-
able where researchers have used OBL alongside GWO. The elite
opposition-based learning (EOGWO) ( Zhang, Luo & Zhou, 2017 )
performs a simplex based opposition on all the wolves. Instead of
taking the upper and lower limits of the function, opposition is
done using the limits of all the wolves. In Improved Grey Wolf Op-
timizer (IGWO) ( Nasrabadi, Sharafi, & Tayari, 2016 ), the wolves are
divided into two sub-groups and the best wolves of one sub-group
replaces the worst wolves of the other sub-group. In the two parts,
one part is partially opposed (in one dimension) and the rest are
opposed in all dimensions. With iterations, the size of the full op-
posed wolves is decreased.
Some authors have included chaos as well as OBL in their meth-
ods. In 2018, Gupta and Deep (2018) have proposed an opposi-
tion based chaotic GWO where they have introduced OBL and local
chaotic search to the GWO to increase the exploration power of the
algorithm. This method shows better convergence as well as better
avoidance of local minima than GWO. In 2018, Ibrahim, Elaziz, and
Lu (2018) have introduced a chaotic opposition based GWO with
DE and disruption operator to solve global optimization problem.
Here, the initial population is enhanced with the help of chaotic
OBL and later is repeatedly updated using DE operators alongside
GWO. In this algorithm, GWO serves for better exploration whereas
DE operators help avoiding the local optima providing better ex-
ploitation. To balance between these two, disruptive operator is
used, so that the population remains diverse after each iteration.
Pradhan, Roy, and Pal (2017) have combined the concept of
GWO and OBL, for accelerating the convergence rate of the algo-
rithm, and then used it to resolve the Economic Load Dispatch
(ELD) problem of power system optimally. On applying this algo-
rithm to solve any type of ELD problem, it has showed competitive
convergence compared to GWO. Another field where OBL and GWO
have been applied is parallel machine scheduling in cloud comput-
ing ( Natesan and Chokkalingam, 2017 ).
In all these papers, the opposite of a candidate is found for all
dimensions or in 1 randomly chosen dimension. However, the ap-
proach of only opposing certain dimensions of a solution to en-
hance the result has not been attempted before. Moreover, to al-
low for a faster convergence, OBL has been applied taking into
mind the extremum present in the current set of wolves. This es-
sentially binds the solutions created using OBL within the current
range of the population. The opposition-based GWO technique in-
troduced in our proposed method can be enhanced by hybridizing
it with other swarm intelligence algorithms or EAs discussed above
for better optimal results and convergence.
3. Basic theory and notations
The two key topics related to our work namely GWO and OBL
are discussed in Sections 3.1 and 3.2 respectively. After that Spear-
man’s coefficient is described in Section 3.3 .
3.1. Grey Wolf Optimizer (GWO)
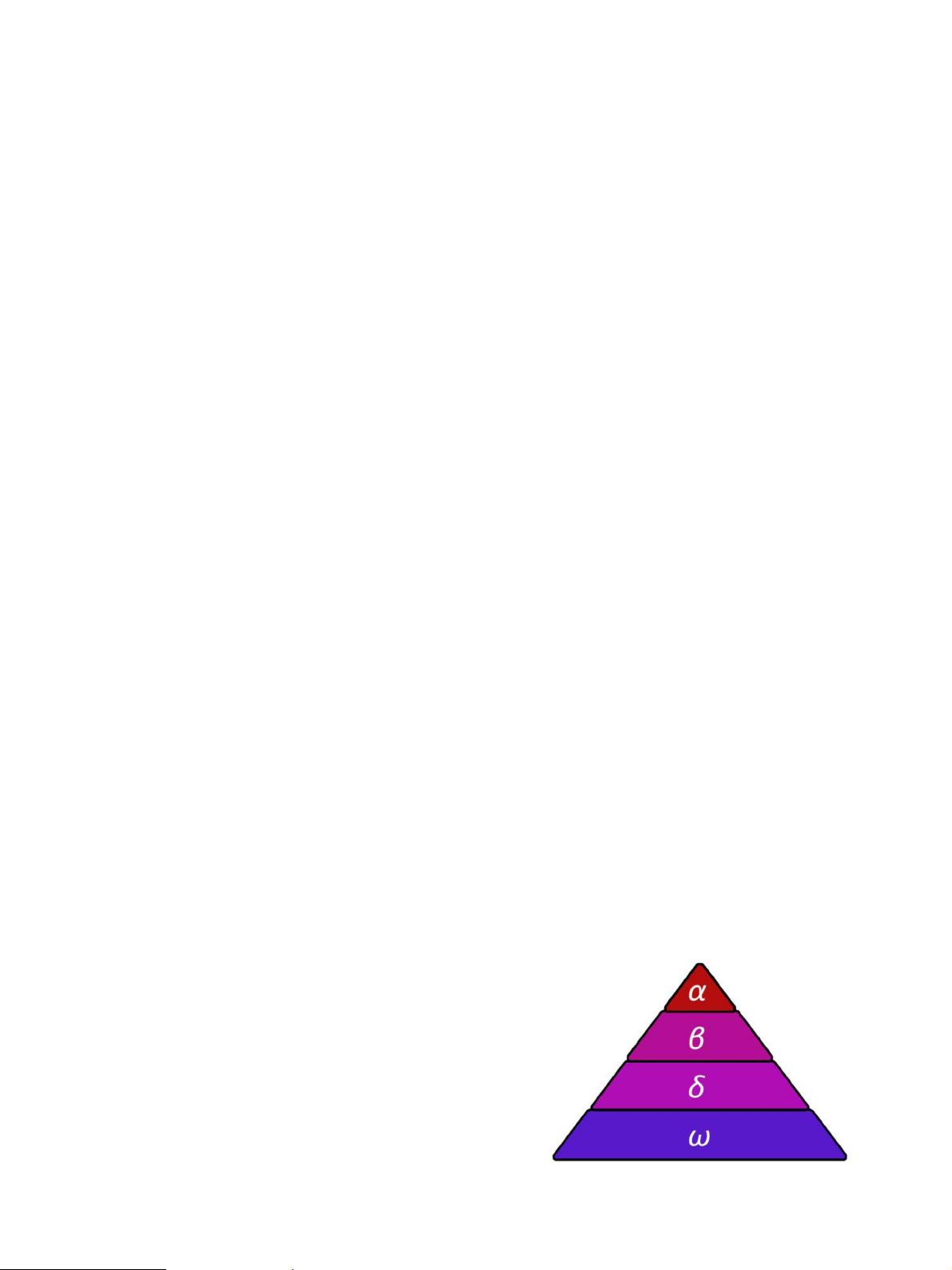
GWO is a metaheuristic optimizer based on the hunting tech-
nique and social hierarchy (see Fig. 1 ) of grey wolves ( canis lupus ),
which has been proposed by Mirjalili et al. (2014) . In a pack of grey
wolves, the leader is called alpha ( α), its subordinates in decision-
making or pack activities are called beta ( β) and the lowest rank-
ing wolves are called omega ( ω). If any wolf does not fit in any of
the three categories then the wolf is called delta ( δ).
During a hunt, the grey wolves encircle the prey, which can be
mathematically expressed as the following equations:
D =
−→
C
1
.
X
p
(
it
)
−
−→
X
w
(
it
)
(3.1)
−→
X
w
(
it + 1
)
=
X
p
(
it
)
−
−→
C
2
.
D (3.2)
where,
it is the current iteration number,
X
p
is the position vector of the prey,
−→
X
w
is the position vector of a grey wolf,
−→
C
1
,
−→
C
2
are the coefficient vectors which are calculated as:
−→
C
2
= 2
d .
−→
rv
1
−
d (3.3)
−→
C
1
= 2 .
−→
rv
2
(3.4)
Fig. 1. Social hierarchy of Grey Wolves.
剩余12页未读,继续阅读
2023-08-23 上传
2019-05-21 上传
2022-06-09 上传
2024-09-27 上传
2024-09-27 上传
2024-09-27 上传
2024-09-27 上传

刘帅_2016
- 粉丝: 152
- 资源: 16
 我的内容管理
展开
我的内容管理
展开







最新资源
- 批量文件重命名神器:HaoZipRename使用技巧
- 简洁注册登录界面设计与代码实现
- 掌握Python字符串处理与正则表达式技巧
- YOLOv5模块改进 - C3与RFAConv融合增强空间特征
- 基于EasyX的C语言打字小游戏开发教程
- 前端项目作业资源包:完整可复现的开发经验分享
- 三菱PLC与组态王实现加热炉温度智能控制
- 使用Go语言通过Consul实现Prometheus监控服务自动注册
- 深入解析Python进程与线程的并发机制
- 小波神经网络均衡算法:MATLAB仿真及信道模型对比
- PHP 8.3 中文版官方手册(CHM格式)
- SSM框架+Layuimini的酒店管理系统开发教程
- 基于SpringBoot和Vue的招聘平台完整设计与实现教程
- 移动商品推荐系统:APP设计与实现
- JAVA代码生成器:一站式后台系统快速搭建解决方案
- JSP驾校预约管理系统设计与SSM框架结合案例解析
