机器人足球入门:C语言控制仿真策略开发
需积分: 10 9 浏览量
更新于2024-07-24
1
收藏 423KB DOC 举报
"机器人足球开发入门指南,涵盖了5V5仿真组(MiddleSimurosot)的介绍、仿真平台与策略关系、运动策略开发以及比赛规则的详细解析。本资源主要针对使用C语言进行程序设计,控制虚拟机器人的比赛策略。"
在机器人足球这一领域,SimuroSot是一个重要的竞赛形式,它不涉及实体机器人,而是通过计算机模拟虚拟机器人进行比赛。参赛者需专注于软件策略的开发,利用清晰的逻辑和编程技巧来实现比赛目标。比赛规则、策略制定和执行是其核心内容。
仿真系统的基本结构包括FIRA提供的仿真程序,该程序通过DLL与参赛队伍的策略程序交互。队伍需要编写自己的DLL,它会根据比赛情况做出决策,并向仿真程序发送指令。系统的精确性得益于采用Yujin机器人的物理模型以及Havok的高级碰撞处理引擎,提供真实的3D界面。
开发环境基于3DRobotSoccerSimulator1.5a,编程语言为C/C++,推荐使用MSVisualC++6.0或MSVS2003作为开发工具。为了帮助初学者,还提供了源程序模板,这些模板以DLL的形式编写,便于开发者理解和快速上手。
在策略开发部分,首先需要理解策略程序的概念,它是控制机器人行为的核心。开发者需要了解仿真平台与策略程序的运行关系,包括场地数据、接口代码解析、程序开发流程等。动作函数是策略中的基本元素,学习如何在策略中调用这些动作至关重要。此外,教程还涵盖了不同类型的定位球策略,如角球、任意球等。
比赛规则部分详尽地定义了比赛的术语、规则、犯规处理、裁判职责以及比赛环境,这些都是参赛队伍必须熟知的内容。熟悉这些规则有助于避免因违规而受到的处罚,同时能更好地规划和执行比赛策略。
这份资源为想要涉足机器人足球领域的学习者提供了全面的引导,从基础的系统介绍到策略开发,再到实战规则,覆盖了参与此类竞赛所需的关键知识。通过学习和实践,开发者可以掌握如何用C语言设计出能够在虚拟足球场上竞争的智能策略。
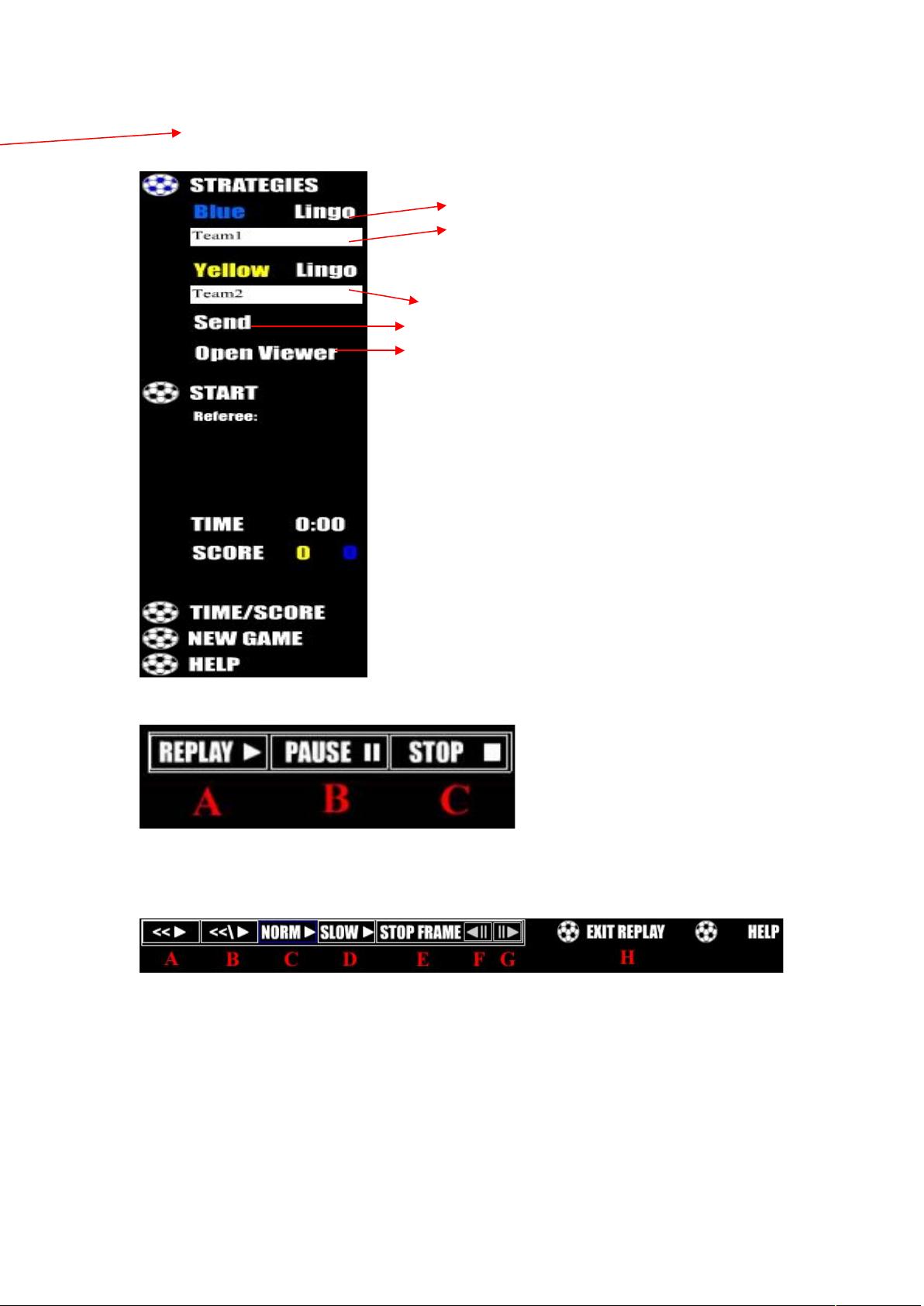
H 平台帮助以及规则
1.5.3 策略载入菜单
选择使用何种开发语言(Lingo/C++)
输入蓝队程序的文件名
输入黄队程序的文件名
将各队程序载入平台
打开状态查看窗口(相识了球和机器人的一些基本信
息)
1.5.4 比赛控制菜单
A-立即回放 B-暂停 C-结束比赛
1.5.5 回放控制菜单
A- 从头开始回放
B- 从前 300 个周期开始回放
C- 一般速度回放
D- 慢速度回放
E- 逐帧回放
F- 推出回放模式
G- 当前进球无效
5
剩余21页未读,继续阅读
2022-01-21 上传
2010-01-23 上传
142 浏览量
108 浏览量
2013-02-02 上传
2008-12-06 上传
2011-10-28 上传

洛-洛
- 粉丝: 16
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Smart_Date Log汇总.7z
- Checkers:使用二维 Square 数组创建和打印棋盘格的 Java 程序
- 基于SSM+vue的地纬公司智能办公系统.zip
- Forex-Fury-V3_ea_
- jQuery全年日历插件之带记事功能特效源码.zip
- 三菱和MODBUS 以及其它设备通讯工程实例,GXV7以上打开.zip三菱PLC编程案例源码资料编程控制器应用通讯通信例子程序实
- delicious-food-game:此游戏是专注于喜欢麦当劳,肯德基等快餐食品的人们的专注游戏。 用Javascript构建
- DATA115:关系数据库和SQL简介
- PyBitBanger:Python 控制的硬件。-开源
- jquery锚点带动画跳转和返回顶部方便定位到相应的模块.zip
- 用于两个设备的LoRa Messenger,距离可达8km-电路方案
- powerbi visual powerbi 视觉模板 275个
- 三菱多段速度控制.zip三菱PLC编程案例源码资料编程控制器应用通讯通信例子程序实例
- 基于ssm+vue高校学生管理系统.zip
- thelearningden.github.io
- mod3_imageprocessing_raspberrypicode_
