DZ-1制动系统CAN协议详解:TPDO周期与数据传输
需积分: 0 37 浏览量
更新于2024-08-04
收藏 63KB DOCX 举报
DZ-1制动控制单元(外部)CAN协议19.1.5-加速度外发+软件版本更新1主要涉及的是DZ-1型直通式制动系统中的通信技术细节。该系统利用CAN(Controller Area Network)现场总线进行数据交换,这是一种工业标准的串行通信协议,被广泛应用于汽车、列车和其他工业自动化系统中,因其高可靠性和实时性而受到青睐。
CAN协议的核心部分是描述了节点间的通信结构和数据传输模式。DZ-1制动系统采用CAN2.0扩展帧格式,这意味着每个数据包包含一个固定的起始标识符(ID),通过左移位操作(ID左移<<21)来确保唯一性。节点ID由Y=1到6标识,COB_ID(通信对象标识符)为0xY8,用于区分不同功能的设备或节点。
在帧结构中,TPDO(Transmitting Process Data Object)是重要的数据输出端口,其周期性地发送不同周期的数据,如128ms、64ms等。每个TPDO都有特定的位号,用于传输不同的信息,例如开关状态、加速度等关键参数。对于架1/6,还存在主设备独有的TPDO,如TPDO8到TPDO12,这些数据传输主要用于更高级别的控制和监控。
此外,上位机(通常指控制系统或计算机)与制动控制单元之间的通信也遵循严格的规则。上位机通过CAN总线发送数据,速率设定为93,帧结构包括信号端、地线和数据字节。每个数据帧由多个字节组成,包括ID(标识符)、数据长度、应用数据等,其中字节0的某些位用于数据长度指示,其余位用于实际数据传输。
在软件版本更新方面,Byte7软件版本(L)位于CPU板(7)的TPDO7中,周期为128ms,可能包含了对系统功能、性能优化或错误修复的重要更新。更新过程可能涉及到对CAN协议栈的调整,以适应新的通信需求或者提高系统的兼容性和稳定性。
这个资源详细介绍了DZ-1制动控制单元的CAN通信架构、帧格式、节点ID分配、数据传输协议,以及与上位机的交互方式,对理解和维护这类基于CAN的制动系统至关重要。同时,软件版本更新也是保证系统正常运行和性能提升的关键环节。
3
3 通讯信息
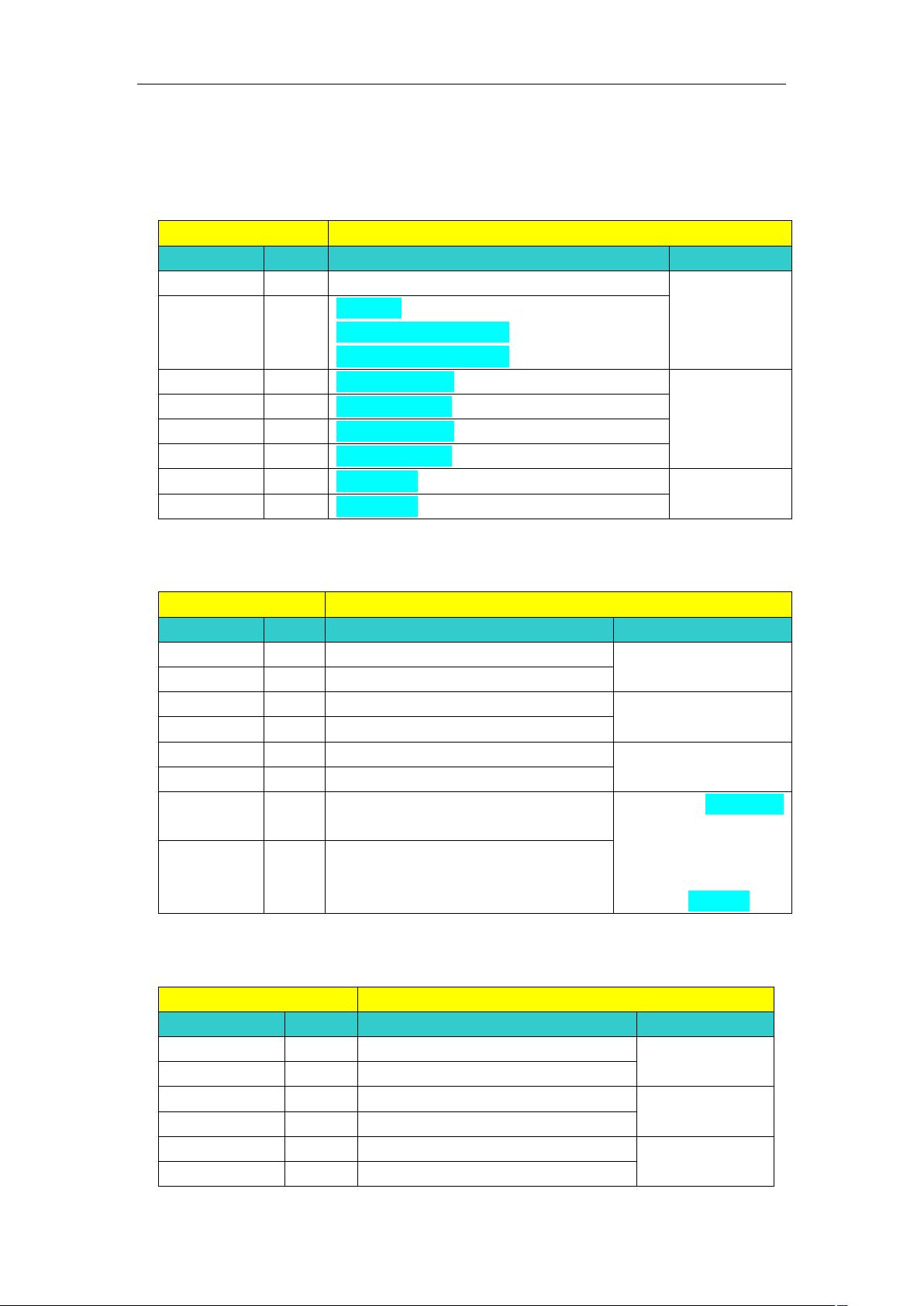
3.1 架 X(X=1~6)发送帧(主/从设备公共数据)
(1)TPDO1:周期 32ms
节点 ID:1~6
COB_ID: 0xY1 Y=1~6 架 X=1~6
字节号
位号
变量描述
备注
Byte0
CPU 板生命信号
Byte1
滑行等级
Bit0-bit3:轴 1 滑行等级
Bit4-bit7:轴 2 滑行等级
Byte2
轴 1 速度信号_H
Byte3
轴 1 速度信号_L
Byte4
轴 2 速度信号_H
Byte5
轴 2 速度信号_L
1=0.1km/h
Byte6
轴 1 减速度
Byte7
轴 2 减速度
1=0.1m/s2
(2)TPDO2:周期 128ms
节点 ID:Y=1~6
COB_ID: 0xY4 架 X=1~6
字节号
位号
变量描述
备注
Byte0
制动风缸压力_H
Byte1
制动风缸压力_L
Byte2
空簧 1 压力_H
Byte3
空簧 1 压力_L
Byte4
空簧 2 压力_H
Byte5
空簧 2 压力_L
Byte6
A/B/C 车停放缸压力_H(X=1/3/5)
或主风管压力_H
Byte7
A/B/C 车停放缸压力_L
或主风管压力_L
仅架 1 / 3 /5(Y=1/4/6)
有停放缸,分别对应
A/B/C 车;
仅架 4 有主风管传感器,
对应 B 车(Y=5)
(3)TPDO3:周期 128ms
节点 ID:Y=1~6
COB_ID: 0xY5 架 X=1~6
字节号
位号
变量描述
备注
Byte0
VLD 压力实际值_H
Byte1
VLD 压力实际值_L
Byte2
制动缸 1 压力_H
Byte3
制动缸 1 压力_L
Byte4
制动缸 2 压力_H
Byte5
制动缸 2 压力_L
剩余12页未读,继续阅读
2022-06-19 上传
2020-01-08 上传
2020-03-26 上传
141 浏览量
162 浏览量
2011-05-23 上传
2016-06-01 上传
206 浏览量

网络小精灵
- 粉丝: 36
- 资源: 334
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++ Qt影院票务系统源码发布,代码稳定,高分毕业设计首选
- 纯CSS3实现逼真火焰手提灯动画效果
- Java编程基础课后练习答案解析
- typescript-atomizer: Atom 插件实现 TypeScript 语言与工具支持
- 51单片机项目源码分享:课程设计与毕设实践
- Qt画图程序实战:多文档与单文档示例解析
- 全屏H5圆圈缩放矩阵动画背景特效实现
- C#实现的手机触摸板服务端应用
- 数据结构与算法学习资源压缩包介绍
- stream-notifier: 简化Node.js流错误与成功通知方案
- 网页表格选择导出Excel的jQuery实例教程
- Prj19购物车系统项目压缩包解析
- 数据结构与算法学习实践指南
- Qt5实现A*寻路算法:结合C++和GUI
- terser-brunch:现代JavaScript文件压缩工具
- 掌握Power BI导出明细数据的操作指南
