特征不变性与Harris角点在图像匹配中的应用
需积分: 3 36 浏览量
更新于2024-07-22
收藏 1.78MB PDF 举报
"本文档深入探讨了特征不变性和Harris角点检测在图像处理中的应用,特别是如何利用这些特性来构建全景图。特征不变性是图像匹配和识别中的关键概念,而Harris角点检测是一种常用的方法。"
在计算机视觉领域,特征不变性是指无论图像经过怎样的几何变换(如旋转、缩放、平移等)或光照变化,图像的某些特性仍能保持不变。这种特性对于图像匹配、图像拼接、3D重建、运动跟踪、对象识别、数据库索引、机器人导航等任务至关重要。
Harris角点检测是一种用于识别图像中具有显著局部变化的点,这些点通常是图像中的边缘或者角点。Harris角点检测器由Chris Harris和Mike Stephens于1988年提出,它基于图像局部区域的强度梯度变化来确定角点。算法通过计算一个称为响应矩阵的2x2矩阵,该矩阵包含了局部像素强度的变化信息。响应矩阵的行列式与迹之差(叫做Harris角点指数)用于判断一个点是否为角点,值越大,表示该点越可能是角点。
Harris角点检测具有以下优势:
1. **旋转不变性**:检测到的角点在图像经过旋转后仍然可以被正确识别。
2. **尺度不变性**:在不同的缩放级别下,角点依然可以被检测到。
然而,Harris角点检测仅解决了特征点的检测问题,对于匹配对应点,还需要一个可靠的描述子。描述子是对特征点周围区域的一种编码,能够区分同一场景中的不同点,即使在光照、视角变化的情况下也能保持稳定。例如,SIFT(尺度不变特征变换)和SURF(加速稳健特征)是常用的具有旋转、尺度和光照不变性的描述子。
在构建全景图时,首先需要在多张图像中检测出特征点,然后找到这些点在不同图像间的对应关系。使用Harris角点检测器找出的特征点,结合稳健的描述子,可以有效地进行匹配。一旦找到对应点,就可以通过这些点对来估计图像间的几何变换(如单应性矩阵或基础矩阵),从而实现图像的拼接。
此外,特征点检测和匹配技术在其他领域也有广泛应用。例如,在3D重建中,通过匹配不同视图的特征点可以恢复场景的三维结构;在运动跟踪中,特征点的跟踪有助于分析物体的动态行为;在对象识别中,特征匹配有助于确定目标物体的身份;在数据库索引和检索中,特征描述子可以用来快速查找相似图像;在机器人导航中,通过地标特征点的识别,可以帮助机器人定位和规划路径。
特征不变性和Harris角点检测是计算机视觉中的基础工具,它们在解决图像处理的各种挑战中发挥着核心作用。理解并熟练运用这些方法,对于提升图像处理系统的性能和鲁棒性至关重要。
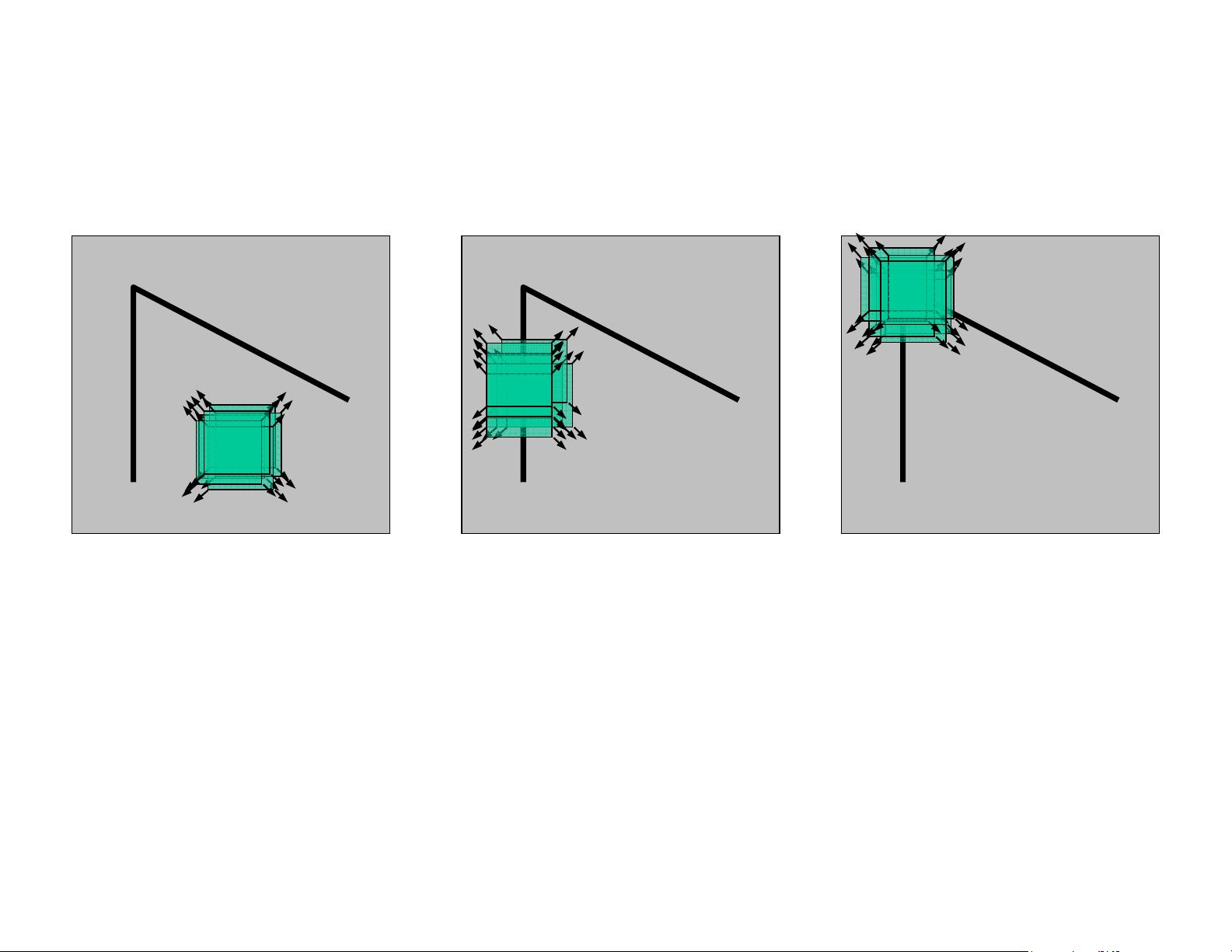
Harris Detector: Basic Idea
“flat” region:
no change in
all directions
“edge”:
no change along
the edge direction
“corner”:
significant change
in all directions
剩余73页未读,继续阅读
2010-04-21 上传
2022-09-22 上传
点击了解资源详情
321 浏览量
2025-01-07 上传
2025-01-07 上传
2025-01-07 上传

轩动day
- 粉丝: 91
- 资源: 52
 我的内容管理
展开
我的内容管理
展开







最新资源
- Save Workspace to Struct:此功能允许将当前工作区中的所有变量保存到结构体数组中-matlab开发
- geojs-storm:GeoSJ Storm示例
- shush
- pablopunk:天哪,它的工作原理
- 广义真值表:生成“真值表”,其中列对应于任意碱基混合中的数字。-matlab开发
- 乡镇2013年第一季度工作总结
- PartyPlanner_Mobile
- PHP168 仿快车模板
- SuperStroke:笔画输入法练习
- ekyc
- 经济技术开发区2013年工作总结及2014年工作思路
- potatoCHIP:Durpa Nimrod实验
- worksheet.rar
- Rate-My-Professor-Vuejs
- LBS^2 loleg模板
- little-bear:Node.js Web框架
