Pololu Maestro舵机控制器用户指南:USB接口与串口通信详解
需积分: 5 6 浏览量
更新于2024-07-06
收藏 1.84MB PDF 举报
本资源是Pololu Maestro伺服控制器用户手册,是一份详细指南,涵盖了Pololu公司的Maestro系列舵机控制器(包括MicroMaestro和MiniMaestro)的使用、安装、功能和通信方法。以下是主要内容的详细解读:
1. **概述**:这部分介绍了Maestro控制器的基本信息,包括其设计目标、主要特性以及适用的场景。它可能涵盖了舵机控制的精确性和多功能性,以及它在工业自动化、机器人、3D打印等领域的应用。
2. **硬件组件与接口**:
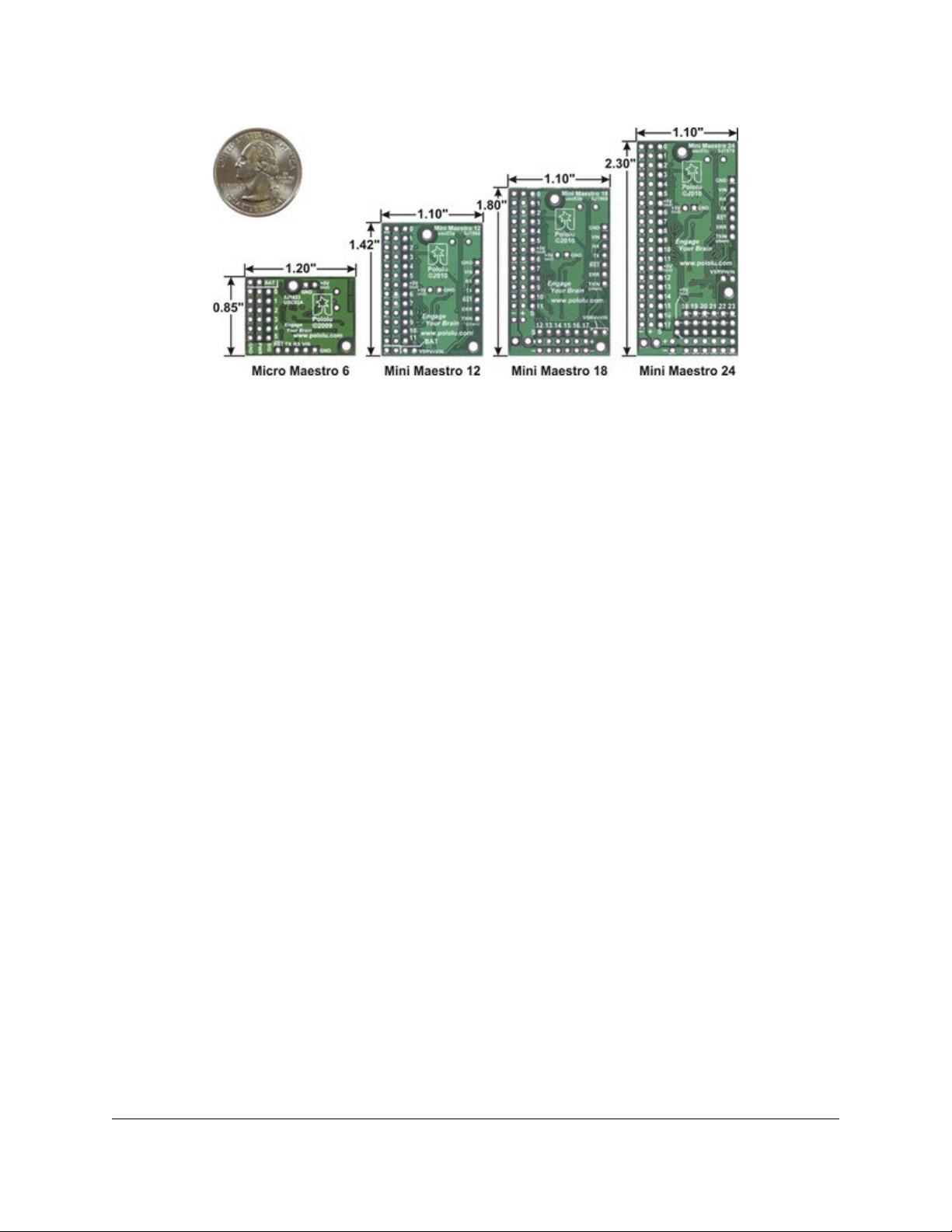
- **MicroMaestro**:详细列出了该控制器的引脚布局,包括电源、输入、输出和状态指示灯等连接点,帮助用户理解硬件配置。
- **MiniMaestro**:提供了Mini版本的相同信息,可能有略微不同的设计,但同样关注接口的兼容性和布局。
3. **指示灯和操作系统支持**:这部分说明了控制器上的指示灯如何显示工作状态,以及它支持的操作系统,如Windows和Linux,确保用户知道如何与控制器进行交互。
4. **入门与安装**:
- **Windows驱动和软件安装**:指导用户如何在Windows环境下安装必要的驱动程序和配套的控制中心软件,确保控制器与计算机系统的无缝集成。
- **Linux驱动和软件安装**:为Linux用户提供了安装步骤,强调了兼容性和配置细节。
- **无USB使用**:介绍了在没有USB连接时,如何通过其他方式(如并行或串行接口)操控Maestro控制器。
5. **Maestro Control Center的使用**:
- **状态和实时控制**:用户可以学习如何查看和调整控制器的状态,以及如何实时地发送指令控制舵机动作。
- **通道设置**:关于舵机通道的配置,包括电压范围、脉冲宽度调制(PWM)频率等,以便精确控制每个伺服电机。
- **Sequencer**:介绍序列器功能,允许用户编写和执行预设的动作序列。
- **脚本输入**:如何编写和执行命令脚本来自动化复杂的控制流程。
- **错误处理**:解释了可能出现的错误及其解决方法,提高了用户故障排查能力。
- **固件升级**:提供了固件更新的步骤,确保控制器性能和新功能的获取。
6. **串口接口**:这一部分的核心内容是Maestro控制器与外部设备的通信。用户会了解到:
- **串口设置**:包括波特率、校验位等配置参数。
- **TTL串行**:讨论了控制器的串行通信方式,包括标准和非标准协议的适用场景。
- **命令协议**:详细说明了用于控制舵机的串行命令结构,以及如何通过串口发送这些命令。
- **CRC错误检测**:阐述了如何利用循环冗余检查来保证数据传输的准确性。
- **脚本命令示例**:提供了各种编程语言的示例代码,如C、Windows C、PIC18F4550的汇编语言、Bash shell脚本以及Arduino库,帮助用户快速上手。
7. **菊花链功能**:如果控制器支持,还介绍了如何通过串口实现多个Maestro之间的串联连接,扩展控制能力。
这份用户手册是深入理解和操作Pololu Maestro伺服控制器的必备指南,覆盖了从硬件到软件,从基础设置到高级功能的全方位内容。无论是初次使用者还是经验丰富的开发者,都能从中找到所需的信息。

Mini Maestro 12 power pins.
Mini Maestro 18 power pins.
Mini Maestro 24 power pins.
The processor and the servos can have separate power
supplies.
Processor power must come either from USB or from
an external 5–16V power supply connected to the VIN
and GND inputs on the left side of the board. It is safe to
have an external power supply connected at the same
time that USB is connected; in that case the processor
will be powered from the external supply. Note that if the
external supply falls below 5 V, correct operation is not
guaranteed, even if USB is also connected.
Servo power connections are provided in the lower right
corner of the Mini Maestro board. On the Mini Maestro 18
and 24, you can make servo power connections via a
2-pin terminal block or a 2-pin 0.1″ header; the Mini
Maestro 12 only has a 2-pin 0.1″ header for connecting
servo power. Servo power is passed directly to the
servos without going through a regulator, so the only
restrictions on your servo power supply are that it must
be within the operating range of your servos and provide
enough current for your application. Please consult the
datasheets for your servos to determine an appropriate
servo power source, and note that a ballpark figure for
the current draw of an average straining servo is 1 A.
You can power the Maestro’s processor and servos from
a single power supply by connecting the positive power
line to both VIN and the servo power ports (only one
ground connection is needed because all ground pins on
the board are connected). The recommended way to do
this is to connect your power supply to the dedicated
servo power pins in the corner of the board and use the
included blue shorting block to connect the pins labeled
“VSRV=VIN”.
The 5V (out) power output allows you to power your own 5V devices from the 100mA on-board
regulator or directly from USB. The on-board regulator is used whenever VIN is powered; in this case,
since the Maestro requires 50 mA, there is about 50 mA available to power other devices.
Pololu Maestro Servo Controller User’s Guide © 2001–2019 Pololu Corporation
1. Overview Page 16 of 102


剩余101页未读,继续阅读
109 浏览量
点击了解资源详情
点击了解资源详情
176 浏览量
109 浏览量
2021-06-26 上传
2021-05-09 上传
120 浏览量
118 浏览量

monkey_hzh
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Juicy-Potato:Windows本地权限提升工具新秀
- Matlab实现有限差分声波方程正演程序
- SQL Server高可用Alwayson集群搭建教程
- Simulink Stateflow应用实例教程
- Android平台四则运算计算器简易实现
- ForgeRock身份验证节点:捕获URL参数到共享状态属性
- 基于SpringMVC3+Spring3+Mybatis3+easyui的家庭财务管理解决方案
- 银行专用大华监控视频播放器2.0
- PDRatingView:提升Xamarin.iOS用户体验的评分组件
- 嵌入式学习必备:Linux菜鸟入门指南
- 全面的lit文件格式转换解决方案
- 聊天留言网站HTML源码教程及多功能项目资源
- 爱普生ME-10打印机清理软件高效操作指南
- HackerRank问题解决方案集锦
- 华南理工数值分析实验3:计算方法实践指南
- Xamarin.Forms新手指南:Prism框架实操教程
