Denso VS6556机械手操作指南与连接设置详解
电装(Denso)VS6556机械手操作手册提供了关于预设连接、操作流程和设置的详细指导。首先,准备工作至关重要,包括:
1. **CN5:编程器连接** - 连接到手提式编程器,便于程序编写和调试。
2. **CN7:输入/输出接口** - 包括I/O Power(用于连接外部输入如RobotStop和EnableStop)和可能的输出接口,根据需要配置输入口控制盒,确保RobotStop和EnableAuto功能正常。
3. **CN8:输入口连接** - 接入Denso输入口控制器,通过线路1和2控制RobotStop,线路3和4控制EnableAuto。根据具体任务需求,可能需要在某些情况下启用或禁用自动功能。
4. **CN11:电源供应** - VS-6556E机械手需要1.9kVA(大约9A电流)的电源,并使用附带的电源接头接入。
5. **CN12:电缆连接** - 使用专用机械手电缆将机械手与其连接,确保电缆兼容性。
在设定位置阶段,用户需要将操作模式切换到手动(MANUAL),选择马达(MOTOR)功能,并保持Deadman switch按下。然后可以通过关节(Joint)或X-Y/Z轴旋转(TOOL模式)来设定各个关节的运动路径。
**TOOL和WORK偏移** 的设置允许用户根据不同工具和工作对象调整机械手的工作空间。通过OK确认并保存设定。
选择移动模式涉及到不同模式的选择,如TEACHING CHECK或AUTO,这影响了机械手的操作方式和速度。
**速度设定** 是一个关键环节,可通过图形界面调整机械手在教导点的速度,同样可在运行程序时进行实时修改。
**记忆位置点** 功能允许用户保存和加载特定的作业位置,但需要注意的是,实际读取的位置会依据所选的TOOL号和WORK号进行调整。
总体来说,电装VS6556机械手操作手册提供了全面的安装、连接、模式选择、速度调整以及位置存储指南,确保用户能够有效地控制和操作这款机械手完成各种工作任务。
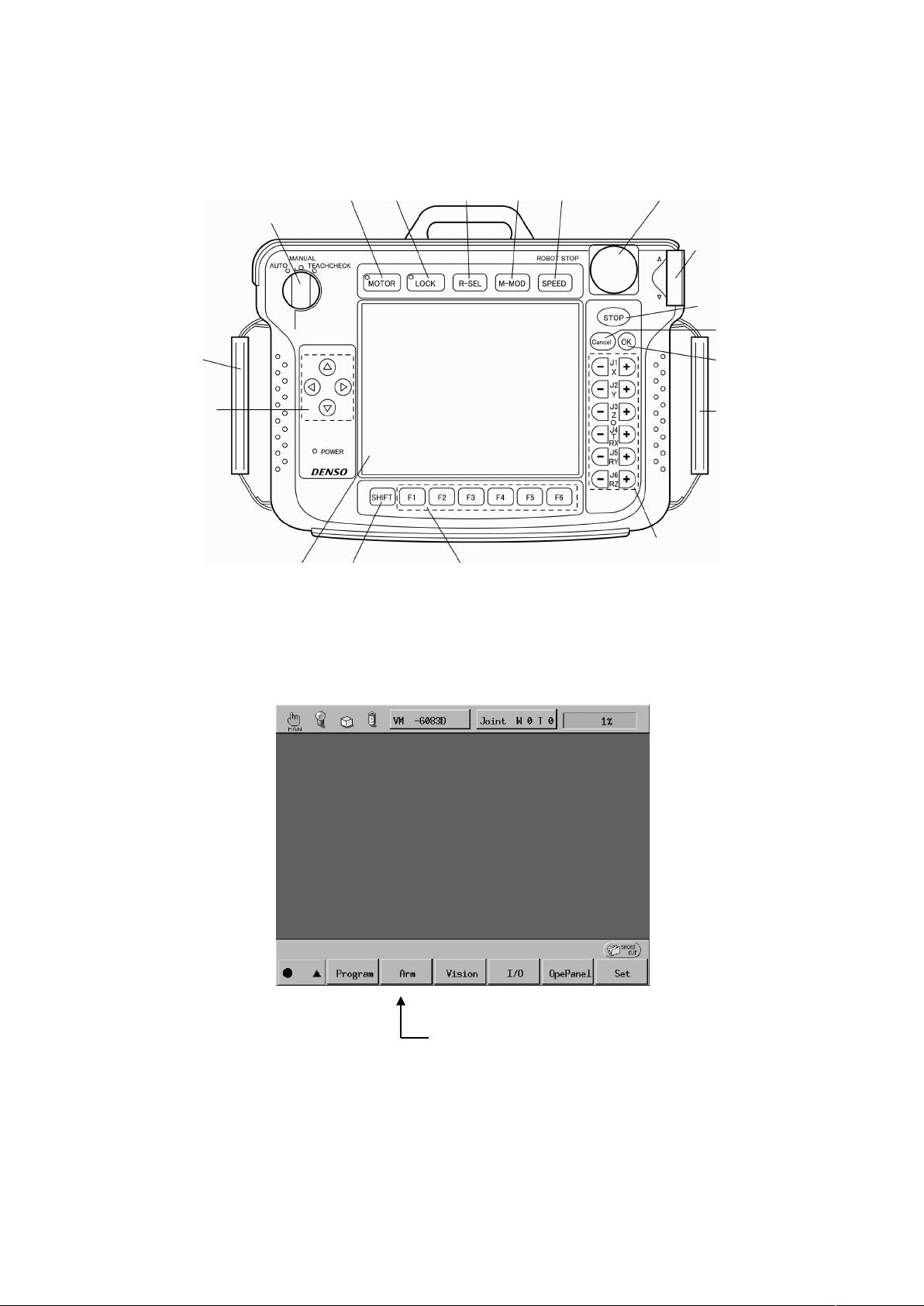
设定位置:
使用教导器
如需教导位置点时,首先操作模式选择为 MANUAL,按 MOTOR(马达),MOTOR 上灯亮.另输入口选
择为 Disable Auto.
3
操作模式選擇鍵
馬達 ON
按觸幕屏此處或 F2
剩余17页未读,继续阅读
2018-10-16 上传
122 浏览量
2024-09-06 上传
2013-05-19 上传
2021-07-15 上传
202 浏览量
2024-06-18 上传

白木rrr
- 粉丝: 2
- 资源: 8
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
