六自由度运动模拟器的数字伺服步进液压缸建模与仿真分析
需积分: 10 3 浏览量
更新于2024-08-13
收藏 300KB PDF 举报
"这篇论文是2007年由肖志权、彭利坤、邢继峰等人发表的,主要探讨了数字伺服步进液压缸的建模与分析,应用于六自由度运动模拟器的设计。"
文章详细介绍了数字伺服步进液压缸的结构和建模过程,这种液压缸由多个关键组件构成,包括二相混合式步进电动机、四边滑阀、阀控非对称缸、细分驱动器和机械反馈机构。在建立数学模型时,作者们深入考虑了各个组成部分的功能和相互作用,特别是那些可能影响系统性能的关键因素。
首先,二相混合式步进电动机是驱动系统的核心,它能够提供精确的角位移控制,通过转换电能为机械能来驱动液压缸运动。然而,步进电机存在非线性特性,这在模型中需要被充分考虑,以确保系统的动态响应准确无误。
其次,四边滑阀是液压系统中的重要部件,用于控制油液流动,其阀芯受力的计算对于理解整个系统的工作状态至关重要。模型中包含了阀芯受力分析,以减小因液压波动导致的不稳定性和误差。
阀控非对称缸的设计旨在提高液压系统的精度和效率,但非对称性可能导致压力分布不均,因此在建模时必须考虑到这种非对称性对缸内压力的影响。
细分驱动器的作用是进一步提升步进电机的定位精度,通过细分技术将大的步距角分成更小的微步,从而实现更平滑的运动。而机械反馈机制则用于监测和校正实际运动与期望运动之间的偏差,确保系统的闭环控制。
在模型构建完成后,研究人员利用MATLAB/Simulink进行数值仿真,这是一个强大的工程仿真工具,可以有效地模拟复杂动态系统的行为。通过仿真,他们能够验证模型的正确性,分析系统的性能,并对可能出现的问题进行预测和优化。
关键词涵盖了“数字”、“伺服”、“步进液压缸”、“建模”和“仿真”,表明本研究集中在数字化控制技术在液压系统中的应用,以及如何通过精确建模和仿真来提升系统性能。这篇论文对于理解数字伺服步进液压缸的工作原理和设计方法具有重要的参考价值,对于从事相关领域研究和工程实践的专业人员来说,是一份宝贵的资料。
数字伺服步进液压缸的建模分析一一肖志权
彭利坤
邢继峰等
数字伺服步进液压缸的建模分析
肖志权
1
,
2
彭利坤
2
1.武汉科技学院,武汉,
430073
邢继峰
2
朱石坚
2
2.
海军工程大学,武汉,
430033
摘要:建立了用于六自由度运动模拟器的数字伺服步进液压缸的数学模型。该数字液压缸包括二
相混合式步进电动机、四边滑阀、阀控非对称缸、细分驱动器和机械反馈机构等部分。建模和分析中考
虑了阀芯受力、步进电机非线性、间隙和死区及摩擦力等问题。基于建模分析,在
MA
TLAB/Simulink
环境中对数字伺服步进液压缸系统进行了数值仿真。
关键词:数字的;伺服;步进液压缸;建模;仿真
中图分类号:
TH137
文章编号
:1004
一
132X(200
7)
16
一
1935
一
04
Modeling Analysis
of
Di
gital Servo Stepping Hydraulic Cylinder
Xiao
Zhiquan
1. 2
Peng
Likun
2
Xing
Jifeng
2
Zhu
Shijian
2
1.
Wuhan
University
of
Science
and
Engineering
,
Wuhan
,430073
2. N a val U ni versi
ty
of
Engineering
, W
uhan
, 430033
Abstract:
A detailed
mathematical
model
of
digital
servo
stepping
hydraulic
cylinder
used
in
6-
Dof
motion
simulator
was
set
up,
which
included
the
kinetics
of 2 -
phase
hybrid
stepping
motor
,
four
-edge
slide valve,
and
valve-controlled
asymmetric
cylinder,
as
well
as
subdivision
driver
and
me
chanical feedback
mechanism.
Some
further
aspects
that
should
be paid
more
attention
to in
modeling
and
analyzing
were
considered
,
such
as
spool forces ,
stepping
motor'
s
non
-linearity
,
gaps
and
dead
zone
,
and
friction
forces of
the
cylinder. Based
on
the
modeling
,
the
simulation
on
the
system
was
carried
out
in
MA
TLAB/Simulink.
Key words:
digital;
servo;
stepping
hydraulic
cylinder;
modeling;
simulation
O
引言
数字伺服步进液压缸(简称数字缸)是由步进
电机、液压滑阅、伺服液压缸和机械反馈机构等构
成的增量式数字控制的机液伺服机构
[IJ
。随着步
进电机及其驱动技术、机械设计和加工技术的进
步,数字缸的性能大幅度提高,并且已有用于大推
力、长行程场合的成功实例[刀。
数字缸的建模分析通常采用传统机液伺服系
统的线性化传递函数模型
[1
,
3]
,函数模型或对机
液伺服系统进行了大量的简化和线性化处理,或
忽略了步进电机及反馈机构的动态特性,故往往
难以反映系统结构的特殊性和大量非线性因素造
成的影响。笔者从数字缸的结构出发,采用非线
性状态方程,建立数字缸的数学模型。
1
数字缸建模
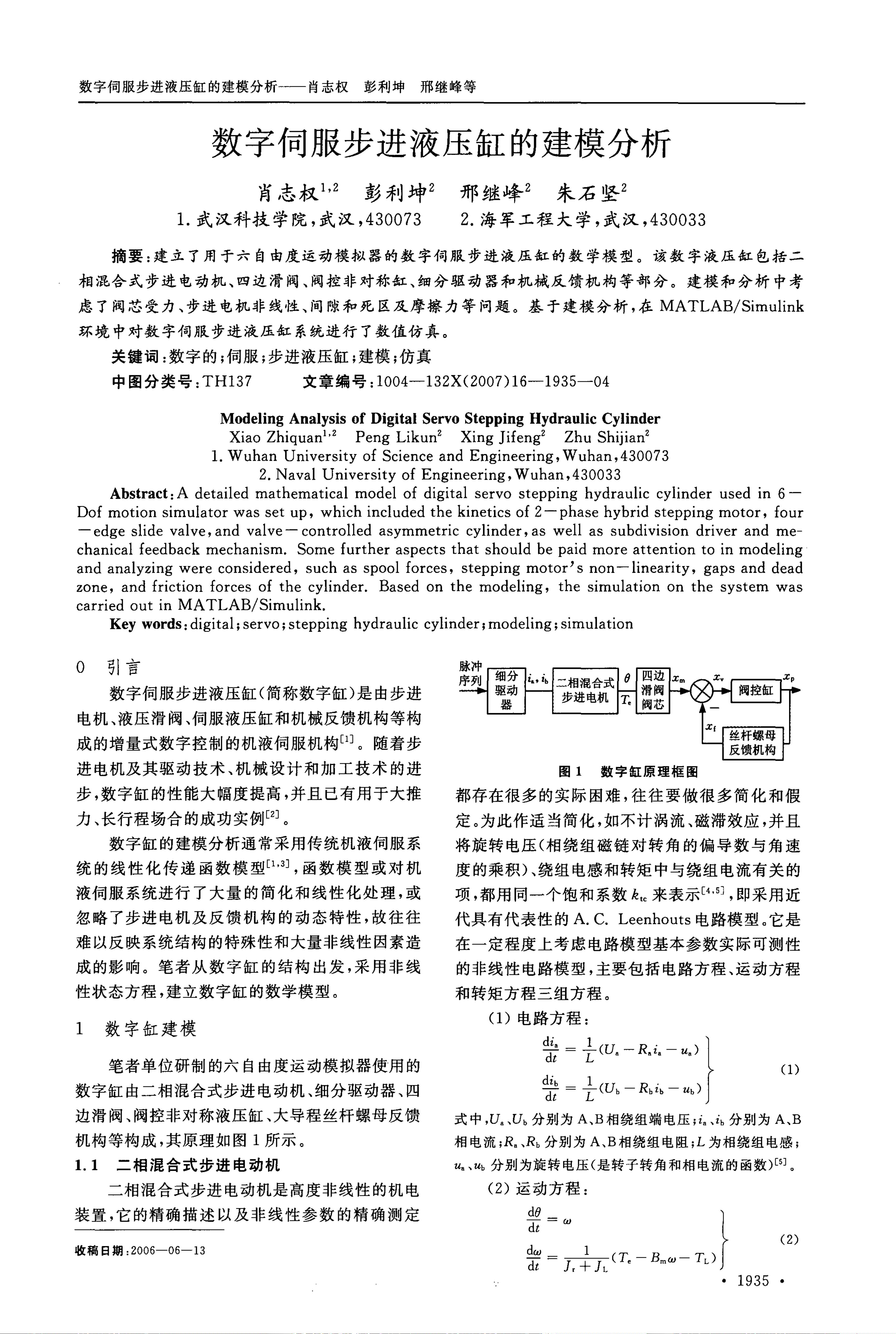
笔者单位研制的六自由度运动模拟器使用的
数字缸由二相混合式步进电动机、细分驱动器、四
边滑阀、阀控非对称液压缸、大导程丝杆螺母反馈
机构等构成,其原理如图
1
所示。
1.
1
二相混合式步进电动机
二相混合式步进电动机是高度非线性的机电
装置,它的精确描述以及非线性参数的精确测定
收稿日期:
2006-06-13
脉冲
序列
管问去品式凶器问
图
1
数字缸原理框图
阀控缸
Xf
I
丝杆螺母
反馈机构
X.
都存在很多的实际困难,往往要做很多简化和假
定。为此作适当简化,如不计涡流、磁滞效应,并且
将旋转电压(相绕组磁链对转角的偏导数与角速
度的乘积)、绕组电感和转矩中与绕组电流有关的
项,都用同一个饱和系数
k
tc
来表示
[4
,
5]
,即采用近
代具有代表性的
A.
C.
Leenhouts
电路模型。它是
在一定程度上考虑电路模型基本参数实际可测性
的非线性电路模型,主要包括电路方程、运动方程
和转矩方程三组方程。
(1)电路方程:
专=士
(U
,
-
R
,
i
,
-
u
,)
di
h 1
一主
=
~(Uh
-
Rhib
-
Uh)
dt L
,
~O
口 o
-0
(1)
式中,矶、
U
b
分别为
A
、
B
相绕组端电压
;
1a
、
ib
分别为
A
、
B
相电流;凡、
Rb
分别为
A
、
B
相绕组电阻
;L
为相绕组电感;
U
,
、
Ub
分别为旋转电压(是转子转角和相电流的函数)
[5J
。
(2)
运动方程:
de
dt
一
ω
dw
1
言
T
•
T
(T
,
-Bmw-T
L
)
(2)
•
1935
•
下载后可阅读完整内容,剩余3页未读,立即下载
117 浏览量
点击了解资源详情
点击了解资源详情
2025-03-06 上传
2025-03-06 上传
2025-03-06 上传
2025-03-06 上传

weixin_38568548
- 粉丝: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全面详实的大学生电工实习报告汇总
- 利用极光推送实现App间的消息传递
- 基于JavaScript的节点天气网站开发教程
- 三星贴片机1+1SMT制程方案详细介绍
- PCA与SVM结合的机器学习分类方法
- 钱能版C++课后习题完整答案解析
- 拼音检索ListView:实现快速拼音排序功能
- 手机mp3音量提升神器:mp3Trim使用指南
- 《自动控制原理第二版》习题答案解析
- 广西移动数据库脚本文件详解
- 谭浩强C语言与C++教材PDF版下载
- 汽车电器及电子技术实验操作手册下载
- 2008通信定额概预算教程:快速入门指南
- 流行的表情打分评论特效:实现QQ风格互动
- 使用Winform实现GDI+图像处理与鼠标交互
- Python环境配置教程:安装Tkinter和TTk
