
收稿日期:
!""# $ %% $ "!
;修订日期:
!""# $ %! $ &%
作者简介:王明东(
%’(% $
),男,河南台前人,郑州大学讲师,哈尔滨工业大学在读博士研究生,主要从事电力系统稳
定分析与控制方面的研究
)
文章编号:
%*(% $ *+&&
(
!""*
)
"% $ ""(’ $ "&
并联型模糊
!"#
复合控制器的
$%&’(%)*
建模与仿真
王明东
%
,苏文霞
!
(
% )
郑州大学电气工程学院,河南 郑州
,#"""!
;
! )
郑州大学信息工程学院,河南 郑州
,#""#!
)
摘 要:在并联型模糊
-./
复合控制器设计中,必须根据偏差大小及时地调整模糊控制部分和
-./
控制
部分的比例,而这种较为复杂的控制策略利用普通的
01234156
模块是很难实现的
)
采用
0 $
函数来解决
这个问题,首先基于
789:8;
语言编写
0 $
函数以实现模糊控制和
-./
控制比例的调整,然后在
01234156
仿真环境下调用
0 $
函数程序,从而建立起模糊
-./
复合控制系统的仿真模型
)
该方法仿真模型简单,编
程容易,可以方便地实现并联结构中各部分所占比例随偏差大小的调整,从而能够取得更好的控制效
果
)
关键词:模糊控制;
-./
控制;
01234156
;
0 $
函数
中图分类号:
9- !(&
;
9- &%!
文献标识码:
8
"
引言
随着被控对象的日趋复杂,采用基于精确模
型的传统控制方法往往难以取得令人满意的控制
效果
)
模糊控制具有不依赖于被控对象的精确数
学模型、动态性能好等优点,目前已在工程实践中
得到了极为广泛的应用
[
% < &
]
)
利用模糊控制动态
性能较好和
-./
控制稳态性能较好的特点,人们
设计了各种复合型控制器,并联型模糊
-./
控制
器即为其中之一
[
,
,
#
]
)
在并联型模糊
-./
控制器中,模糊控制部分
和
-./
控制部分所起作用大小的比例对于控制器
的性能有着很大影响
)
对于这种较为复杂的控制
系统,用普通的
01234156
模块 是无法 搭建仿真 模
型的
)
笔者在介 绍并联 型模糊
-./
控制 器和
0 $
函数的基础上,用
789:8;
语言编写
0 $
函数,然
后在
01234156
仿真环境下调用
0 $
函数程序,建立
模糊
-./
控制系统的仿真模型,方便地实现了随
偏差大小两种控制所占比例的调整
)
%
并联型模糊
-./
复合控制器
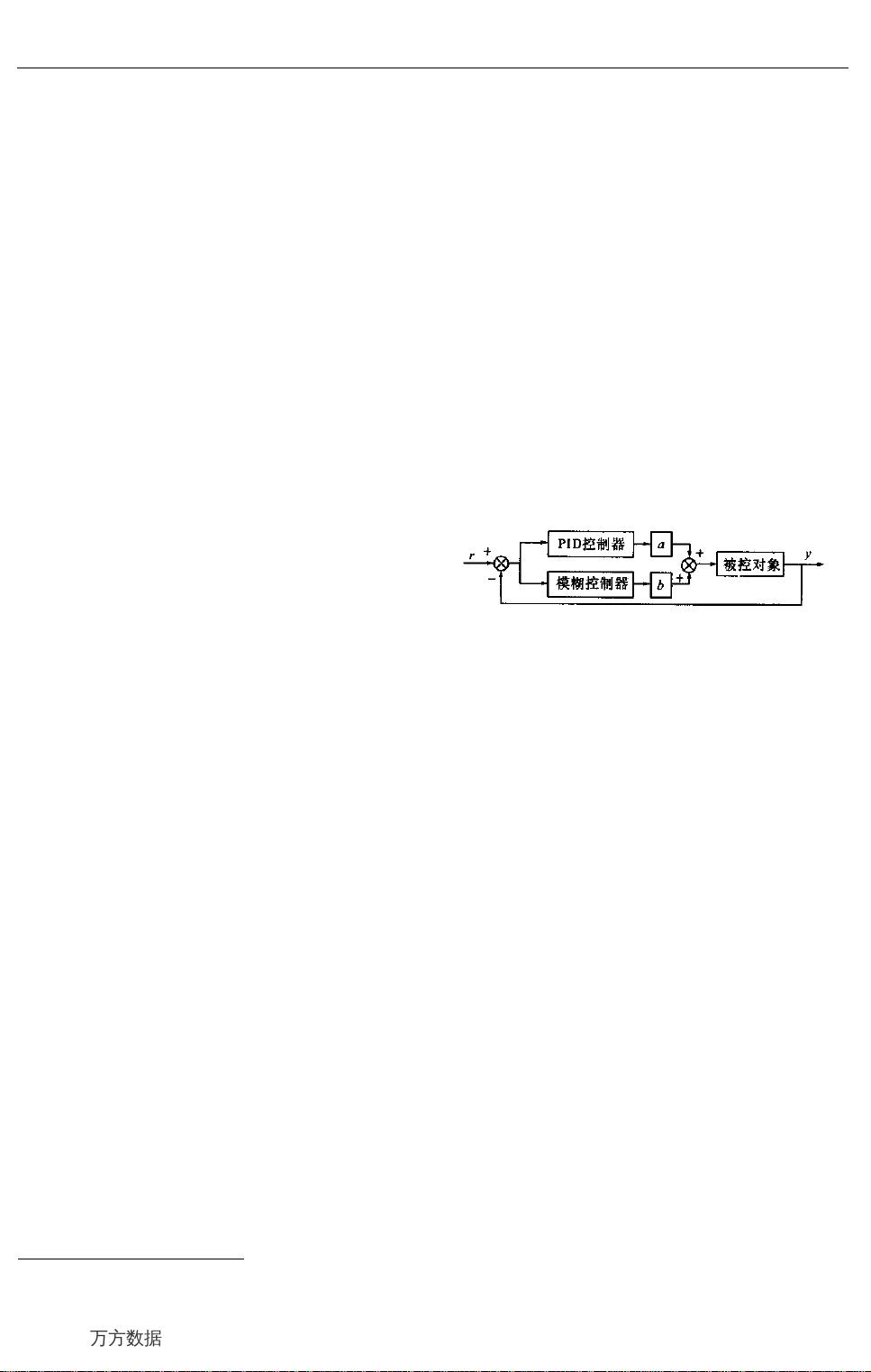
并联型模糊
-./
控制系统的结构如图
%
所示,
图中的
!
和
"
为权重
#
显然,当
! = %
,
" = "
时,仅
-./
控制器起作用;当
! = "
,
" = %
时,仅模糊控制
器起作用;而在一般情况下,二者共同作用
)
图
+
并联型模糊
!"#
复合控制系统结构图
,%- . + /0)1%-’234%0) 01 &’(4%5(6 , ’778 9 !"#
:0&50’); :0)420( <8<46&
为了结合模糊控制和
-./
控制的优点,可以
使权重随偏差的大小而改变
)
当偏差较大时,
!
取
得小一些;而当偏差较小时,
"
取得小一些,从而
可以扬长避短,取得较好的控制性能
)
! 0 $
函数
[
*
]
对于简单控制系统,利用
01234156
所带 的基
本模块就可以很方便地搭建出仿真模型
)
然而当
控制系统较为复 杂时,用普 通 的
01234156
模块 搭
建出的仿真模型就非常复杂,甚至无法搭建
) 0 $
函数(
0>?@A2 B35C@1D5
)是一 种 描 述 动 态 系统的计
算机程序,采用非图形化的方法来解决复杂问题
)
首先写出描述复杂问题的状态方程或分段方程或
待用算法的
0 $
函数程序,然后通过
01234156
的
0
$
函数模块调用
0 $
函数程序,与其他基本模块一
起即可建立复杂系统的仿真模型
)
因此,
0 $
函数提
供了一种有效、便捷的开发工具,可以不断拓展模
块库
)
0 $
函数具有固定的程序格式,引导语句为:
!""*
年
&
月
第
!(
卷 第
%
期
郑 州 大 学 学 报( 工 学 版 )
ED3F5G4 DH IJA5KLJD3 M51NAF?1@>
(
O5K15AAF15K 0C1A5CA
)
7GF ) !""*
PD4 )!( QD )%
万方数据
下载后可阅读完整内容,剩余3页未读,立即下载

niuzaihenmang6345
- 粉丝: 2
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 李兴华Java基础教程:从入门到精通
- U盘与硬盘启动安装教程:从菜鸟到专家
- C++面试宝典:动态内存管理与继承解析
- C++ STL源码深度解析:专家级剖析与关键技术
- C/C++调用DOS命令实战指南
- 神经网络补偿的多传感器航迹融合技术
- GIS中的大地坐标系与椭球体解析
- 海思Hi3515 H.264编解码处理器用户手册
- Oracle基础练习题与解答
- 谷歌地球3D建筑筛选新流程详解
- CFO与CIO携手:数据管理与企业增值的战略
- Eclipse IDE基础教程:从入门到精通
- Shell脚本专家宝典:全面学习与资源指南
- Tomcat安装指南:附带JDK配置步骤
- NA3003A电子水准仪数据格式解析与转换研究
- 自动化专业英语词汇精华:必备术语集锦
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


