松下A5系列伺服电机驱动器英文操作指南
"松下A5驱动器使用手册英文版提供了关于如何正确安全使用松下MINAS A5系列交流伺服电机和驱动器的详尽指导。"
这篇文档详细介绍了松下A5系列驱动器的使用方法,是用户在操作前的重要参考材料。以下是手册中的关键知识点:
1. 产品识别与型号:
手册首先教导用户如何辨认和选择适合应用的A5系列驱动器及其组件。这包括理解产品的规格信息,确保所选设备符合预期的工作需求。
2. 安装检查:
在使用产品之前,用户需要进行驱动器模型的检查与安装。这部分内容将指导用户如何正确地安装设备,避免因不恰当的安装导致的问题。
3. 准备工作:
这一部分涵盖了操作前的准备工作,如设置电源、连接电机以及配置必要的参数。用户需要了解如何正确地接线和设定驱动器,以便驱动器能与电机正确通信并提供动力。
4. 参数设置:
手册详细阐述了如何设置MINAS A5系列的参数,这包括但不限于速度控制、位置控制、电流限制等。正确的参数设置对于优化系统性能和保护设备至关重要。
5. 故障诊断与排除:
用户可以学习如何定位可能出现问题的症状,并采取适当的纠正措施。这部分内容有助于快速解决运行中遇到的故障,减少停机时间。
6. 安全警告:
文档中包含了重要的安全注意事项,强调未经许可不得复制文档,并指出内容可能会随时更新。用户必须遵守安全指南,以避免操作过程中可能产生的风险。
7. 维护与保养:
手册还会涵盖设备的日常维护和保养方法,以保持设备的最佳工作状态并延长其使用寿命。
8. 技术规格:
提供了A5系列驱动器的技术规格,如额定功率、电压、电流等,帮助用户评估是否适合特定的应用场景。
通过这个英文版的手册,用户不仅能够深入了解松下A5驱动器的功能和操作,还能提升设备的使用效率和安全性。虽然手册是英文版本,但内容详实且结构清晰,对于具备一定英文基础的用户来说,是掌握松下A5系列驱动器的关键参考资料。
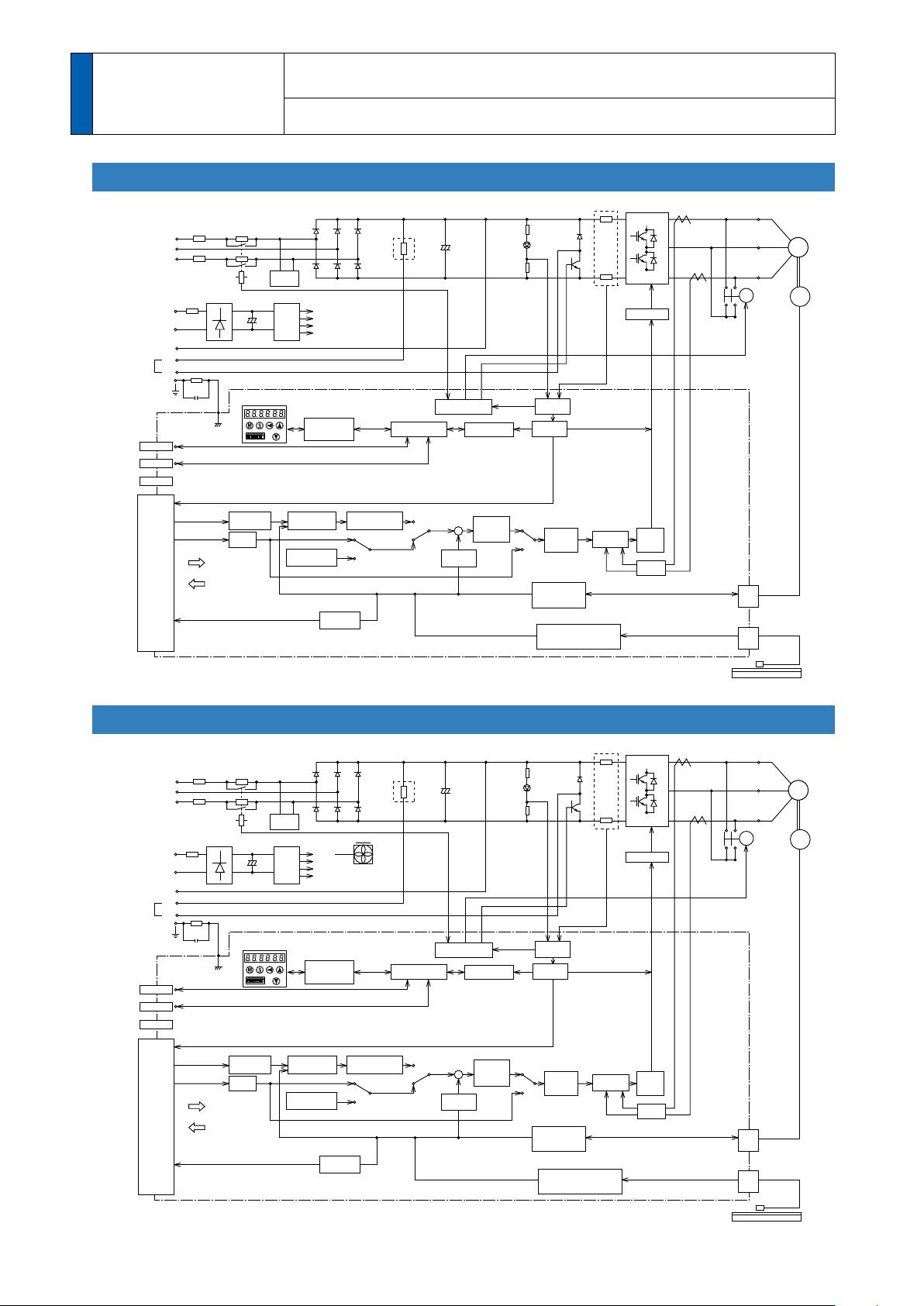
1-4
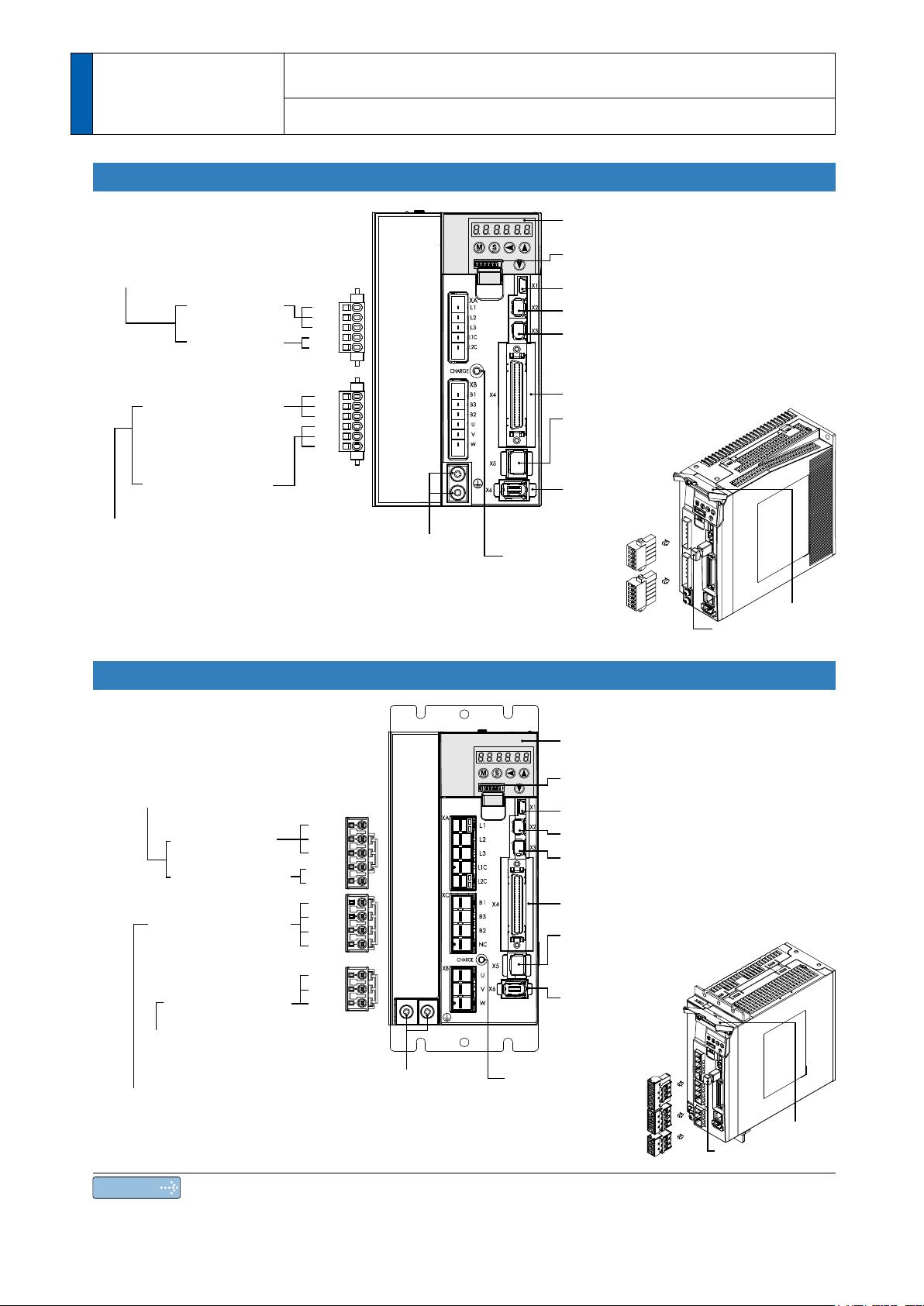
A to D-frame
F-frame
Charge lamp
L1C
L2C
L1
L2
L3
B1
B3
B2
V
U
W
Connector XA:
for main power connection
05JFAT-SAXGF (JST)
Connector XB:
for motor connection
06JFAT-SAXGF (JST)
Terminals for external
regenerative resistor
(Normally short-circuit
B3 to B2)
Connector X6:
for encoder
connection
Connector X4: Parallel I/O connector
Connector X3: Safety function connector
Connector X2: for Serial bus
Connector X1: USB connector
Connector X5:
for feedback scale
connection
Connector X7: Monitor connector
Front panel
LED cover
Safety by-pass prug
Screws for earth (x2)
Main power
input terminals
Control power
input terminals
Terminals for motor
connection
1 Before Using
the Products
2. Driver
Parts Description
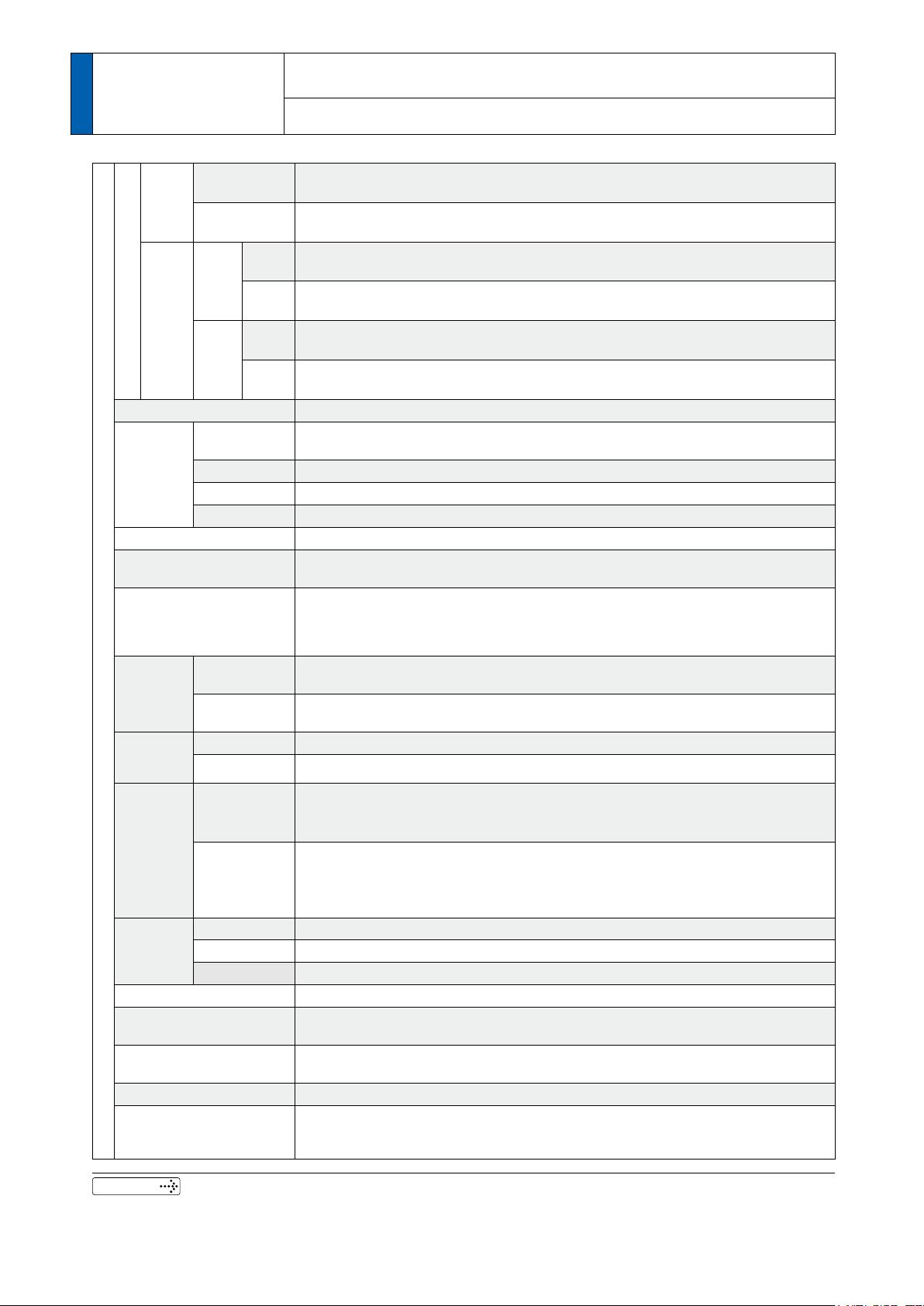
Note
Connector X1 and X2 are attached in A to D-frame driver.
Connector XA, XB and XC are attached in E-frame driver.
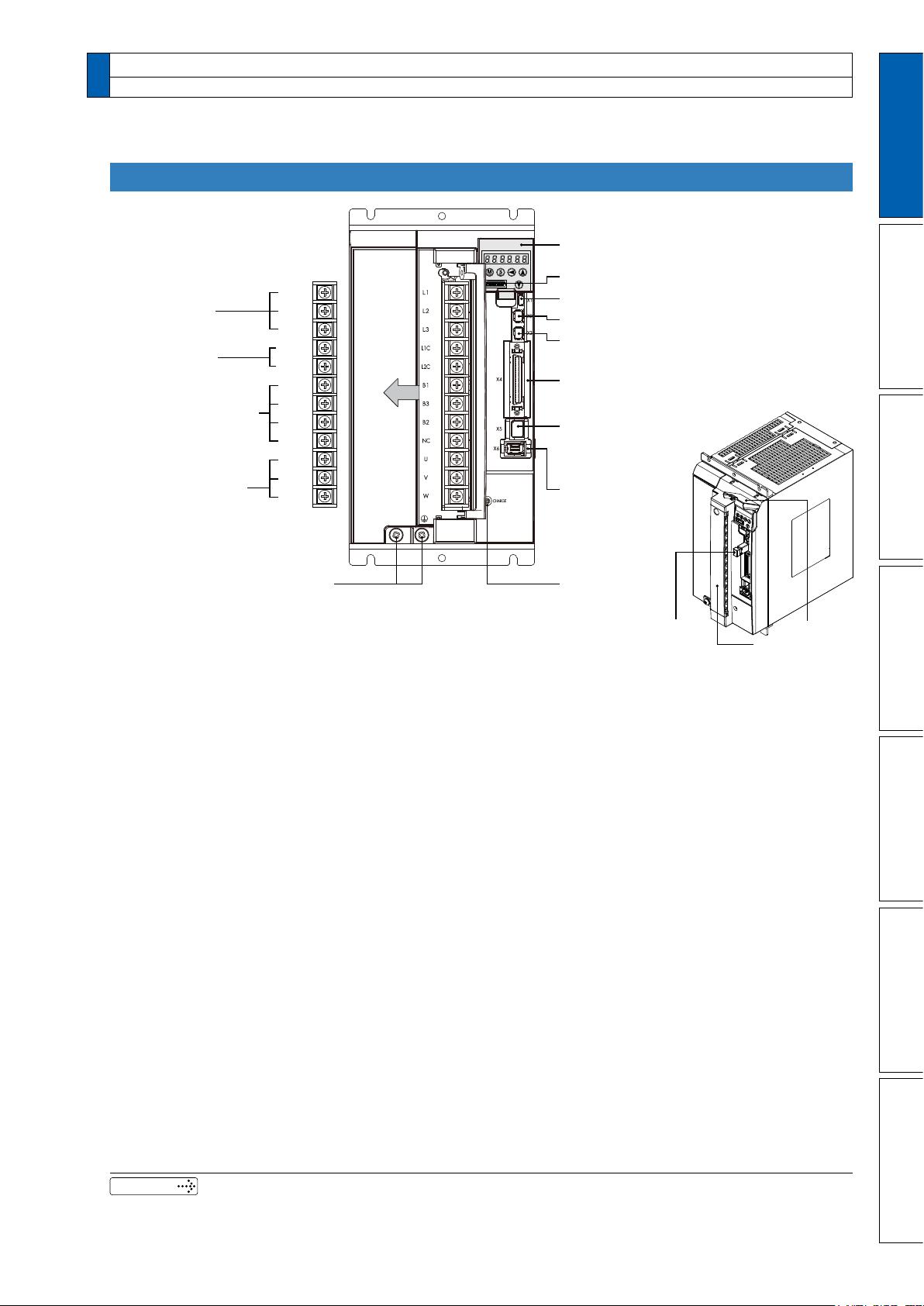
Screws for earth
(x2)
Charge lamp
L1C
L2C
L1
L2
L3
B1
B3
B2
NC
U
V
W
Connector XA:
for main power connection
05JFAT-SAXGSA-L (JST)
Connector XB:
for motor connection
03JFAT-SAXGSA-L (JST)
Connector XC:
Connector for external
regenerative resistor
04JFAT-SAXGSA-L (JST)
Terminals for external
regenerative resistor
(Normally short-circuit
B3 to B2)
Terminals for motor
connection
Control power
input terminals
Main power
input terminals
Connector X6:
for encoder
connection
Connector X4: Parallel I/O connector
Connector X3: Safety function connector
Connector X2: for Serial bus
Connector X1: USB connector
Connector X5:
for feedback scale
connection
Connector X7: Monitor connector
Front panel
LED cover
Safety by-pass prug
剩余393页未读,继续阅读
694 浏览量
310 浏览量
690 浏览量
195 浏览量
2208 浏览量
2013-03-30 上传
197 浏览量
694 浏览量

qinguanghan
- 粉丝: 0
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- IP网络设计系列之-基本原则
- Guice的用户手册
- JavaScript弹出窗口DIV层效果代码
- MCTS 70-431 中文题库
- Foundations.of.F.Sharp.May.2007
- linux 服务器的安设置
- javascript浮动div,可拖拽div,遮罩层(div和iframe实现)
- 自动化 C++程序设计.pdf
- 高质量 C++ 和 C 编程指南.pdf
- 163邮箱客户端的设置详细说明
- 多线程编程指南.pdf
- 运用Asp.Net Mobile Controls 开发面向移动平台的Web Application
- 电脑主板知识.pdf
- Welcome to Protected Mode
- WAP中实现数据库附件下载
- C和C++ 嵌入式系统编程.pdf
