Cognex相机标定:三大问题与解决方案
需积分: 0 62 浏览量
更新于2024-08-04
1
收藏 686KB PDF 举报
在进行相机标定的过程中,可能会遇到一些常见的问题,这些问题会影响到系统的精度和稳定性。本文将详细介绍三个主要问题及其解决方案,以帮助用户有效解决这些问题。
首先,当自动标定完成后,如果发现RMS(Root Mean Square,均方根误差)值大于100,这通常意味着标定过程中的姿态估计存在较大偏差。问题可能出在运动系统的旋转方向上,特别是在X-Y-A丝杆平台中,制造商有时会错误地设定旋转轴。为确定旋转方向,需按以下步骤操作:
1. 让设备沿X轴正向移动,确认X轴定位;
2. 向Y轴正向移动,验证Y轴;
3. 旋转设备,检查旋转是否从X轴至Y轴,若不是,则需要联系厂商电控人员调整电机接线,确保正确旋转方向,然后重新标定。
第二个问题是,即使旋转方向正确,标定后RMS值依然较大。这可能是由于旋转角度不准确造成的。通过以下步骤检查:
1. 用吸嘴吸住标定片,移动到相机正上方拍照;
2. 转动吸嘴特定角度,再次拍照;
3. 在VisionPro中对比两张照片,利用FindLine工具测量相邻黑色方格边缘的夹角,计算差值与实际旋转角度对比。如果差值接近,说明角度设置正确;反之,通知厂商优化脉冲设置。
最后一个问题是,当旋转方向和角度都确认无误,但RMS值仍偏大时,问题可能源于厂商提供的坐标数据不准确。此时,需要逐个核对厂商提供的点位坐标,确保它们与机器人实际运动轨迹相符。点位顺序的混乱也可能导致问题,需要与厂商核实并纠正。
解决相机标定过程中RMS过大的问题,需要从运动系统方向、旋转角度精确性和坐标准确性三个方面进行全面排查,并根据具体情况采取相应的调整措施。确保标定过程的严谨性对于提升机器视觉系统的性能至关重要。
3 | Confidential © 2014 Cognex Corporation
问题描述:
旋转方向正确,但自动标定完成后,查看RMS值仍然过大
问题: RMS过大
解决方法:
确认运动系统旋转角度是否正确。具体方法如下:
a) 让吸嘴吸住一张标定片,运动到下相机的正上方,拍照取像。
b) 接着让吸嘴旋转旋转一定角度(不要太小也不要太大),取像。
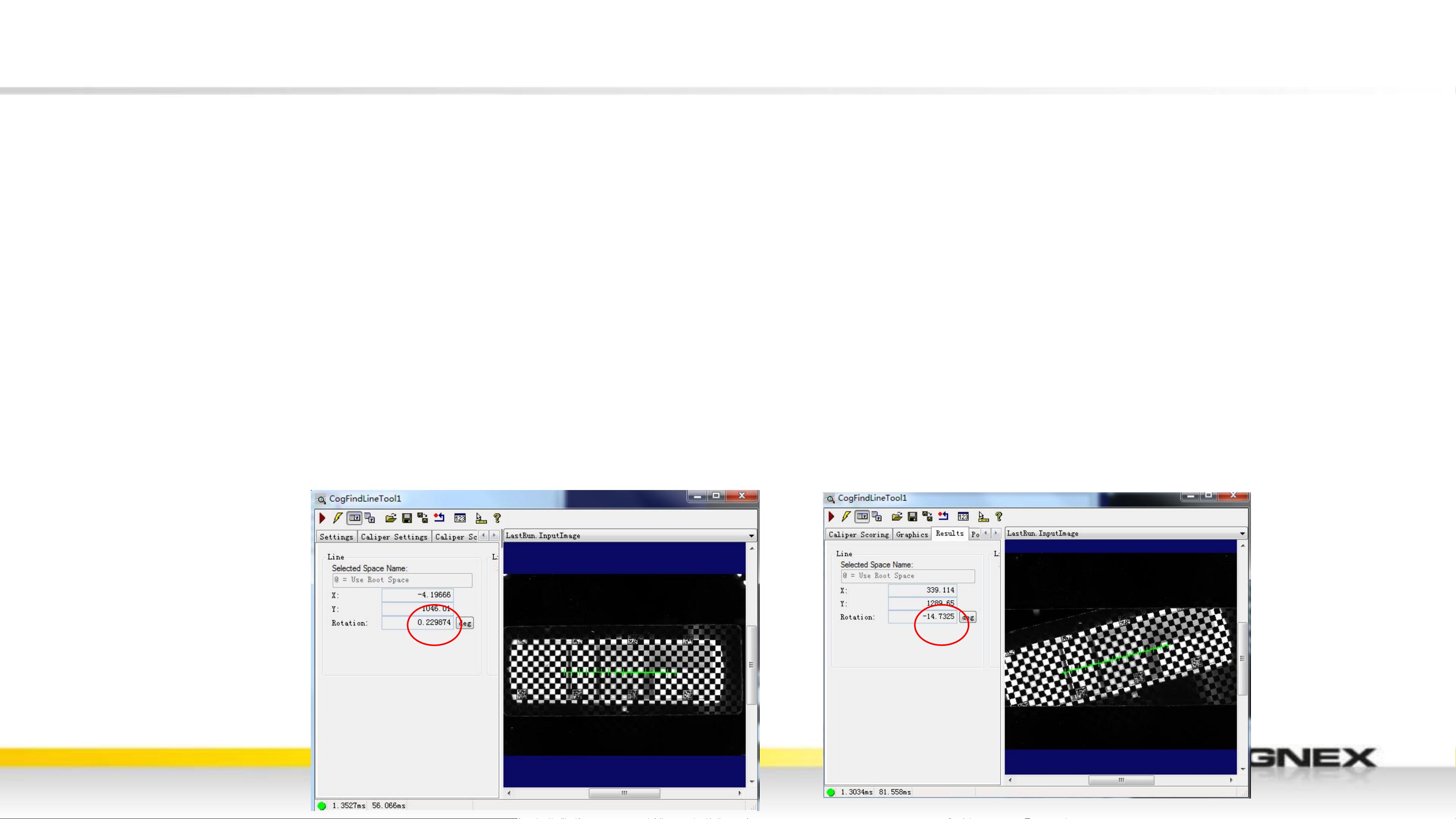
c) 打开VisionPro , 载入这两张原始照片,用FindLine工具抓靠近标定片中间的同一排黑色
方格的边缘,求取直线的角度。然后把两条直线角度相减,查看差值是否接近吸嘴所转的
角度,如果很接近,那说明角度没有问题;如果相差较大,说明厂商的脉冲设置不合理,让其改
善,直到正确为止。
剩余10页未读,继续阅读
2018-10-16 上传
2012-12-24 上传
2024-11-10 上传
2024-11-10 上传
2024-11-10 上传
2024-11-10 上传

Brave2022
- 粉丝: 1
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- NIST REFPROP问题反馈与解决方案存储库
- 掌握LeetCode习题的系统开源答案
- ctop:实现汉字按首字母拼音分类排序的PHP工具
- 微信小程序课程学习——投资融资类产品说明
- Matlab犯罪模拟器开发:探索《当蛮力失败》犯罪惩罚模型
- Java网上招聘系统实战项目源码及部署教程
- OneSky APIPHP5库:PHP5.1及以上版本的API集成
- 实时监控MySQL导入进度的bash脚本技巧
- 使用MATLAB开发交流电压脉冲生成控制系统
- ESP32安全OTA更新:原生API与WebSocket加密传输
- Sonic-Sharp: 基于《刺猬索尼克》的开源C#游戏引擎
- Java文章发布系统源码及部署教程
- CQUPT Python课程代码资源完整分享
- 易语言实现获取目录尺寸的Scripting.FileSystemObject对象方法
- Excel宾果卡生成器:自定义和打印多张卡片
- 使用HALCON实现图像二维码自动读取与解码
