分层代价地图:上下文敏感导航的新方法
需积分: 9 116 浏览量
更新于2024-08-31
1
收藏 1.03MB PDF 举报
"上下文敏感的导航分层代价地图.pdf"
这篇文档主要介绍了上下文敏感的导航分层代价地图的概念和优势,这是针对机器人导航系统的一种改进方法。传统的导航系统,如ROS(Robot Operating System)中的导航功能包,通常依赖于单一的代价地图来规划机器人的路径,这些地图中的每个网格单元仅存储占用或自由状态。然而,这种方法在应对动态、有人参与的环境时存在局限性,因为它无法充分表达复杂的情况。
作者提出了一种名为分层代价地图(Layered Costmaps)的新技术,它将代价地图的数据处理分散到多个语义无关的图层中。每个图层专注于跟踪一类特定的障碍物或约束,然后将这些信息整合到主代价地图中,用于路径规划。这种设计允许更灵活地适应不同环境,简化了特定场景下的参数调整,并能加速路径规划过程。
文档详细阐述了分层代价地图的数据结构和更新算法,以及相对于单源代价地图的改进点。它指出,分层设计能够清晰地表达各种信息,更好地支持复杂的代价计算,尤其在需要利用上下文信息进行导航的环境中。
文档还列举了一些标准地图层,如基础的地图层,以及新增的功能,如人机交互层。这些地图层可以定制以适应不同的需求,例如,人机交互层可能用于处理与人类互动时的特殊规则或约束。
在讨论部分,作者探讨了这种方法的潜力和应用,强调了它在实际导航任务中的有效性。文档通过与单源代价地图的比较,展示了分层代价地图在时间和性能上的改进,以及在真实世界环境中的导航能力。
这篇文档提供了一个创新的解决方案,以解决机器人导航系统在复杂环境中的挑战,通过分层代价地图提升了导航系统的灵活性、可调整性和效率。
Layered Costmaps for Context-Sensitive Navigation
David V. Lu, Dave Hershberger, and William D. Smart
Abstract— Many navigation systems, including the ubiquitous
ROS navigation stack, perform path-planning on a single
costmap, in which the majority of information is stored in
a single grid. This approach is quite successful at generating
collision-free paths of minimal length, but it can struggle in
dynamic, people-filled environments when the values in the
costmap expand beyond occupied or free space.
We have created and implemented a new method called
layered costmaps, which work by separating the processing of
costmap data into semantically-separated layers. Each layer
tracks one type of obstacle or constraint, and then modifies a
master costmap which is used for the path planning. We show
how the algorithm can be integrated with the open-source ROS
navigation stack, and how our approach is easier to fine-tune
to specific environmental contexts than the existing monolithic
one. Our design also results in faster path planning in practical
use, and exhibits a cleaner separation of concerns that the
original architecture. The new algorithm also makes it possible
to represent complex cost values in order to create navigation
behavior for a wide range of contexts.
I. INTRODUCTION
Navigation algorithms have become increasingly sophisti-
cated over the decades. They can process large amounts of
sensor data to keep track of the locations of obstacles and
free space with great accuracy. Combined with the right path
planners, they can navigate robots around their environments
with great skill. However, many of these navigation algo-
rithms suffer from the same problem: the algorithms optimize
based on the single constraint of finding efficient collision-
free paths.
Such an algorithm is fine for many use cases, or for
navigation in the abstract, if all that matters is getting from
point A to point B. It is not sufficient for other use cases.
For robots moving in dynamic environments populated with
people, more complex constraints need to be integrated into
the optimization. Moving from one point to another is just
one part of a larger context. It is not enough that a robot
moves around an obstacle just to avoid a collision; the robot
must treat that obstacle differently because of what it is
semantically. For example, driving a few centimeters away
from a table is perfectly fine in most cases. However, driving
that closely to a person is socially undesirable. Yet, if the
navigation algorithm treats all sensed obstacles equally, there
is no way for the path planner to be able to choose one path
over the other.
Lu is a PhD candidate in the Dept. of Computer Science at Washington
University, St. Louis, Missouri, 63130. davidlu@wustl.edu
Hershberger contributed to this work while he was a research scientist at
Willow Garage, Inc. Menlo Park, CA hersh@gmail.com
Smart is faculty in the Department of Mechanical Engineering, Oregon
State University. bill.smart@oregonstate.edu
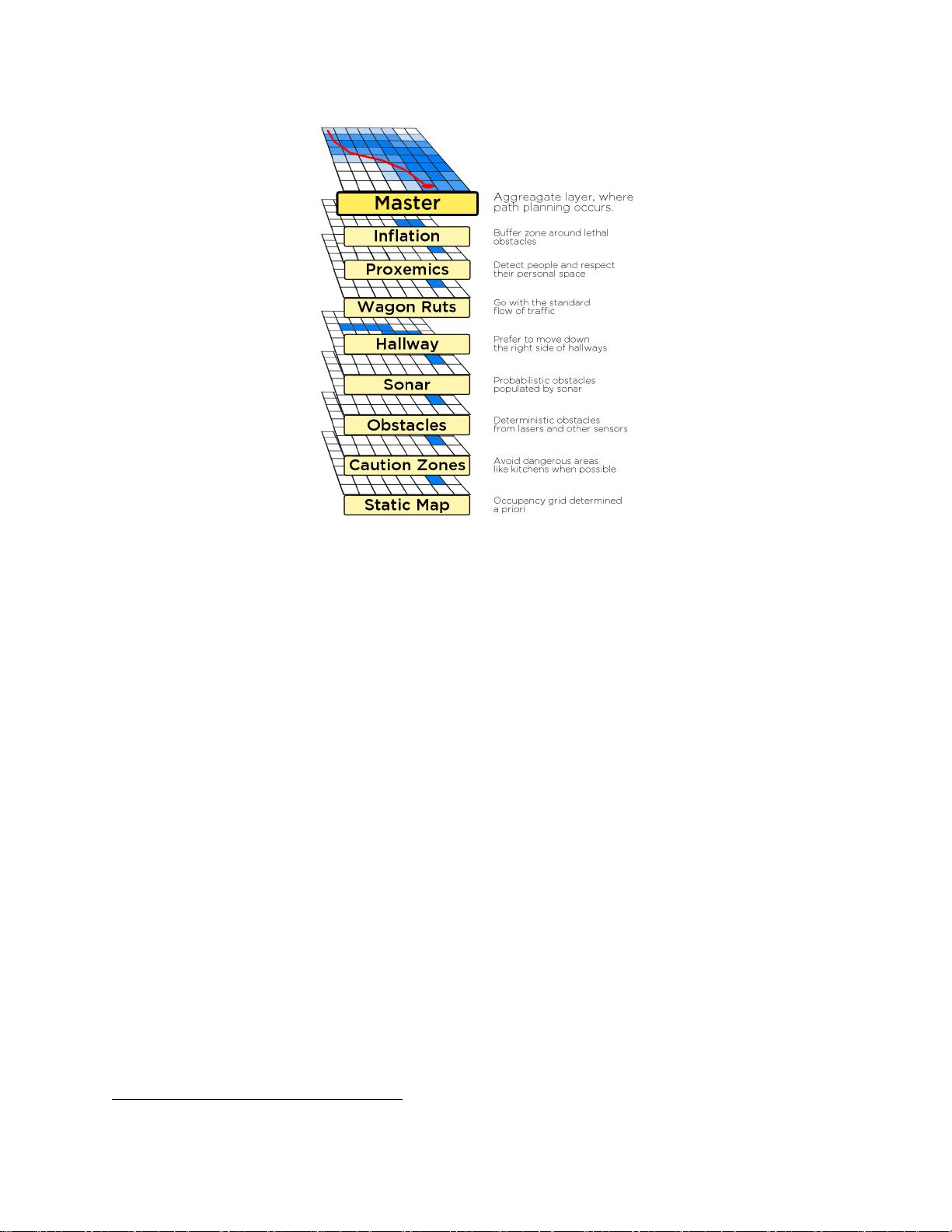
Fig. 1. A stack of costmap layers, showcasing the different contextual
behaviors achievable with the layered costmap approach.
There are many additional scenarios, beyond respect-
ing people’s personal space, where choosing the shortest
collision-free path may not be optimal. Given information
about where people often are, a longer path that avoids
probable obstacles may be preferable. The robot must also
consider the utility of entering potentially hazardous areas,
such as kitchens, which are valid paths, but they come with
a cost. Even simple factors like driving on the right side of
a hallway will need to be considered. Which path the robot
takes will depend on having additional information about the
larger contexts.
The information about the environment that the path
planners use is stored in a costmap. In a traditional costmap,
all of the data is stored in the singular grid of values, in what
we term a monolithic costmap. The monolithic costmap has
been the prevailing technique because of its simplicity, in
that there is only one place to read values from and write
values to. One result of this is that a great deal of semantic
information about the values in the costmap is lost, which
makes proper maintenance of the costmap from cycle to
cycle more difficult.
In this paper, we introduce our solution for incorporating
the additional semantic information into costmaps, with
a new approach called layered costmaps. Using the ROS
Navigation framework as a starting point, we show that the
layered costmaps replicate the functionality of the previous
navigation algorithm, while adding the flexibility to handle
图 1: 一组 costmap 图层,展示了使用分层 costmap 方法可实现的不同上下文行为。
Fraichard
[10]
开发了更为复杂为感知人类行为的导航代价计算方法。
3 单源代价地图 (Monolithic Costmap)
单源代价地图 (Monolithic Costmap), 所有数据皆存储于单个网格中,是当前工程实现 costmap 的基
础,包括普遍使用的 ROS
[11]
。本文着重于 ROS 功能包的算法及其实现,这是因为 ROS 已获得大量使
用,运行于上十种机器人硬件上1。ROS 使用一张单源代价地图进行全局规划,同时在局部规划中使用
另一张单源代价地图进行规划。
单源代价地图被证实在规划最短无碰撞路径 (collision-free path) 方面是非常有效的。将初值写入代
价地图的做法非常直观,但由于存储空间非常有限,更新过程存在问题,这就限制了它所能实现的功能
类型非常有限、代价地图的利用效率不高、可扩展性不强等缺陷。单源代价地图的主要缺点如下:
1) 更新期间的信息很有限:单源代价地图的一个很大的缺陷是代价地图中的大部分信息存储于一
个位置。考虑一个简单的传感器数据与全局代价地图中已有值之间冲突的例子。传感器数据表明地图
中的某个区域是开阔的,而代价地图上却说明该区域存在障碍。更新代价地图的正确方法应与数据的
来源及附加的语义信息有关。一种情况是先前的值是已经移动的人的位置;所以,正确的处理方式是将
代价图中标记为“lethal”(致命区域) 的值更新为“free”(自由区域),使得机器人可以在新腾出的空间
通行。但是,一个同等有效的情况是:代价地图中的值来自静态地图的值,静态地图在创建的时候就包
含了传感器无法看到的障碍物,例如玻璃墙。此种情况下,代价地图中应保留“lethal”值。
在单源代价地图中是无法区分这两种情况的,因为两种情况都在代价地图中将它标记为“lethal”。
只要代价地图中的值为单种类型值,代价地图就会从数据中删除代价地图所表示的任何语义信息。
1http://wiki.ros.org/navigation/RobotsUsingNavStack
3
剩余10页未读,继续阅读
2022-06-07 上传
2019-09-20 上传

Jzzzzzzzzzz
- 粉丝: 36
- 资源: 8
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端协作项目:发布猜图游戏功能与待修复事项
- Spring框架REST服务开发实践指南
- ALU课设实现基础与高级运算功能
- 深入了解STK:C++音频信号处理综合工具套件
- 华中科技大学电信学院软件无线电实验资料汇总
- CGSN数据解析与集成验证工具集:Python和Shell脚本
- Java实现的远程视频会议系统开发教程
- Change-OEM: 用Java修改Windows OEM信息与Logo
- cmnd:文本到远程API的桥接平台开发
- 解决BIOS刷写错误28:PRR.exe的应用与效果
- 深度学习对抗攻击库:adversarial_robustness_toolbox 1.10.0
- Win7系统CP2102驱动下载与安装指南
- 深入理解Java中的函数式编程技巧
- GY-906 MLX90614ESF传感器模块温度采集应用资料
- Adversarial Robustness Toolbox 1.15.1 工具包安装教程
- GNU Radio的供应商中立SDR开发包:gr-sdr介绍
