Matlab Simulink仿真:一级倒立摆的控制与建模
17 浏览量
更新于2024-08-03
收藏 223KB DOC 举报
本文主要探讨了在MATLAB的Simulink库中对倒立摆在控制系统方面的仿真研究。倒立摆是一种典型的不稳定系统,具有非线性和多变量的特点,是控制理论领域的重要研究对象,因其理论价值和实际应用广泛,例如在航空航天、机器人技术以及控制理论教学中的应用。
首先,文章详细介绍了倒立摆的基本构成,包括一个小车连接质量为m的球形成的一级倒立摆,通过控制小车的位置和力u,使摆杆保持垂直。研究中忽略了摩擦和空气阻力,简化了模型以便于分析。
研究的核心内容分为三个部分:
1. **系统建模与定性分析**:构建了一级倒立摆的数学模型,并进行了定性分析,指出在平衡点处,系统既可控又可观测,这为后续的控制设计提供了基础。
2. **起摆过程与能量控制**:深入研究了倒立摆的起摆过程,着重讨论了如何通过控制策略来确保摆杆从初始位置迅速而平稳地达到期望的平衡位置,同时控制振动幅度和角度/速度。
3. **Matlab Simulink仿真**:利用MATLAB 2021a的Simulink库,分别构建了单级倒立摆状态反应控制系统和包含状态观测器的版本。这一步骤旨在验证理论模型,并通过仿真验证控制算法的有效性和稳定性。
**仿真模型的构建**:
- 单级倒立摆状态反应控制系统:通过Simulink创建模型,模拟小车的位移x、速度dx/dt以及摆杆偏离垂直线的角度θ和角速度dθ/dt之间的关系,实现对摆杆的精确控制。
- 状态观测器的加入:为了增强系统的透明度和性能,还构建了一个状态观测器,用于估计系统的内部状态,进一步提升控制精度。
**控制目标与总结**:
倒立摆的控制目标是快速到达稳定平衡位置,同时抑制振荡,确保系统能在扰动下保持稳定。论文总结了整个仿真过程,强调了这种复杂系统控制方法在实际应用中的意义。
通过本文的研究,读者可以了解到倒立摆控制的理论基础、实际模型构建以及MATLAB工具在这一领域的应用,这对于理解和实践控制系统的设计具有重要的参考价值。
倒立摆在 matlab 的 simulink 库下的仿真
倒立摆是处于倒置不稳定状态,人为控制使其处于动态平衡的一种摆。对于
倒立摆系统的控制研究长期以来被认为是控制理论及其应用领域里引起人们极
大兴趣的问题,倒立摆系统是一个典型的快速、多变量、非线性、不稳定系统。
研究倒立摆控制能有效地反映控制中的许多问题,倒立摆研究具有重要的理论价
值和应用价值,理论上,它是检验各种新的控制理论和方法的有效实验装置。应
用上,倒立摆广泛应用于控制理论研究!航空航天控制,机器人、杂技顶杆表演等
领域,在自动化领域中具有重要的价值。另外,由于此装置本钱低廉,结构简单,便于
用模拟、数字等不同方式控制,在控制理论教学和科研中也有很多应用。
本论文中,以一级倒立摆为研究对象,对它的起摆以及稳定控制做了研究,主
要研究工作如下:
1.首先介绍了倒立摆系统的组成和控制原理,建立了一级倒立摆的数学模型,
对倒立摆系统进行定性分析,但在平衡点是能控的、能观的。
2.分析了倒立摆的起摆过程,对倒立摆的起摆能量反应控制进行分析与说明。
3.在 matlab2021a 的 simulink 库下对倒立摆构造单级倒立摆状态反应控制系
统的仿真模型和构造具有状态观测器的单级倒立摆状态反应控制系统的仿真模
型。
4.对这次仿真的总结。
一、倒立摆的控制目标
倒立摆的控制问题就是使摆杆尽快地到达一个平衡位置,并且使之没有大的
振荡和过大的角度和速度。当摆杆到达期望的位置后,系统能克服随机扰动而保
持稳定的位置。
二、建立单级倒立摆系统的状态空间模型
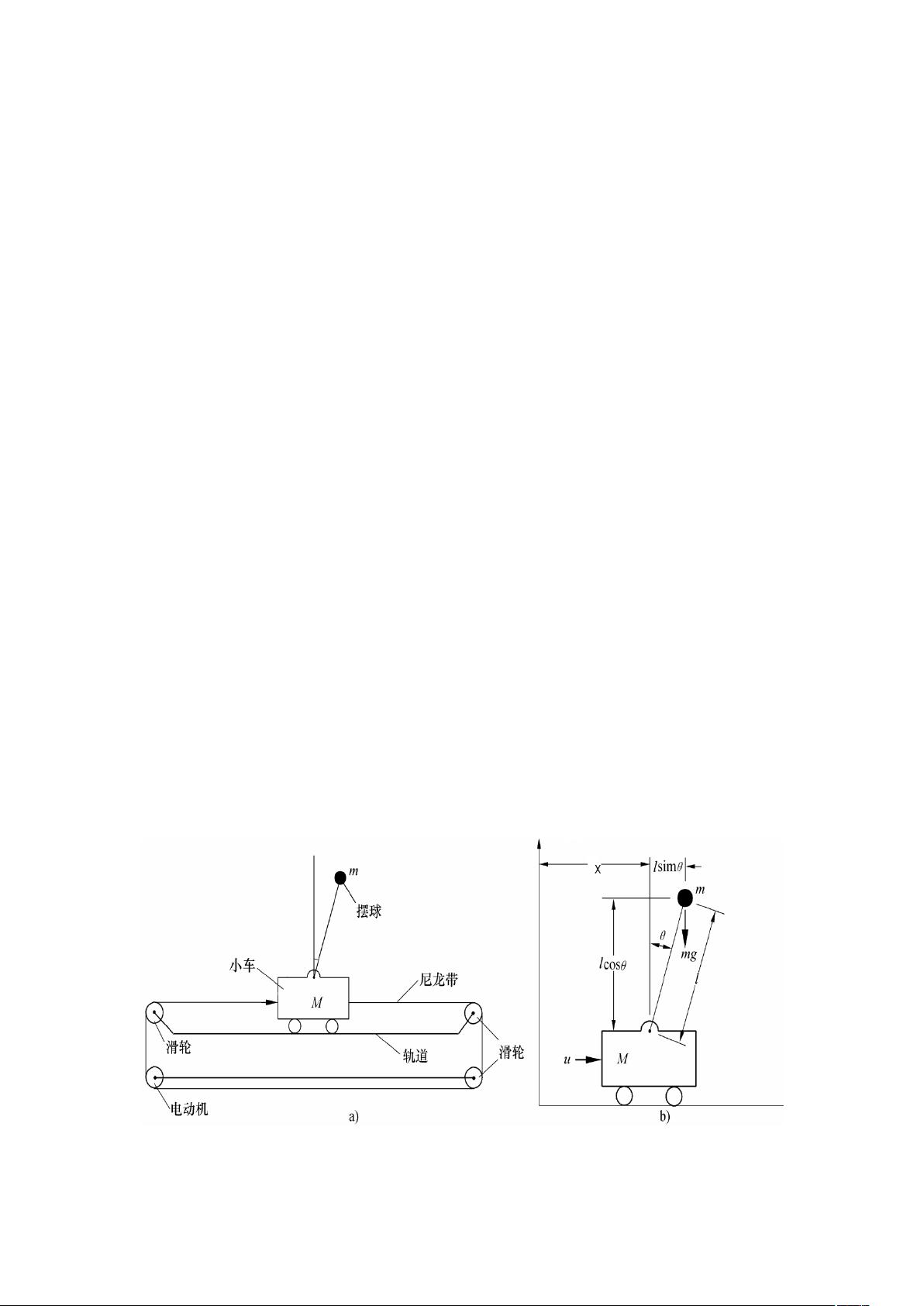
其中,质量为 M 的小车在水平方向滑动,质量为 m 的球连在长度为 L 的刚
性摆一端,x 表示小车的位移,u 是作用在小车上的力,通过移动小车使带有小
球的摆杆始终处于垂直的位置。为了简单起见,假设小车和摆仅在一个平面内运
动,且不考虑摩擦、摆杆的质量和空气阻力。如图 1
图 1
下载后可阅读完整内容,剩余7页未读,立即下载
2022-07-02 上传
2021-10-06 上传
2022-07-05 上传
2021-09-29 上传
2023-08-29 上传
2022-11-23 上传
2022-03-22 上传

ohmygodvv
- 粉丝: 507
- 资源: 4811
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全国江河水系图层shp文件包下载
- 点云二值化测试数据集的详细解读
- JDiskCat:跨平台开源磁盘目录工具
- 加密FS模块:实现动态文件加密的Node.js包
- 宠物小精灵记忆配对游戏:强化你的命名记忆
- React入门教程:创建React应用与脚本使用指南
- Linux和Unix文件标记解决方案:贝岭的matlab代码
- Unity射击游戏UI套件:支持C#与多种屏幕布局
- MapboxGL Draw自定义模式:高效切割多边形方法
- C语言课程设计:计算机程序编辑语言的应用与优势
- 吴恩达课程手写实现Python优化器和网络模型
- PFT_2019项目:ft_printf测试器的新版测试规范
- MySQL数据库备份Shell脚本使用指南
- Ohbug扩展实现屏幕录像功能
- Ember CLI 插件:ember-cli-i18n-lazy-lookup 实现高效国际化
- Wireshark网络调试工具:中文支持的网口发包与分析
