TM1639: 天微8x8数码管驱动芯片,经济高效
需积分: 10 152 浏览量
更新于2024-07-15
收藏 685KB PDF 举报
TM1639是一款由天微电子生产的专为LED驱动和键盘扫描设计的集成电路,它集成了微控制器(MCU)、数据锁存器、LED驱动器以及键盘扫描功能,适用于各种小型家电设备,如智能热水器、微波炉等,可以实现自动扫描显示,显著节省单片机的时间资源。这款芯片采用CMOS工艺,具备8段×8位的显示模式,支持4×2bit的键扫描,能进行辉度调节,提供串行接口包括CLK、STB和DIO。其工作方式为RC振荡,内置上电复位电路,有SOP24和SDIP24两种封装形式。
TM1639的主要特性包括:
1. CMOS工艺:确保了芯片的低功耗和可靠性。
2. 8x8显示模式:支持大规模的字符显示。
3. 键扫描功能:可以有效处理和响应外部按键输入。
4. 辉度调节:通过改变占空比实现不同程度的亮度控制。
5. 串行接口:便于与微控制器和其他外围设备通信。
6. 内置复位电路:保证了系统在上电后的初始状态稳定。
7. 多种封装形式:适应不同应用场合的封装选择。
管脚定义部分详细列出了各个引脚的功能,例如DIO用于数据的输入输出,CLK作为时钟信号,STB作为片选信号,而K0和K1作为键扫描输入,SGE1/KS1至SEG4/KS4则同时作为输出段驱动和键扫描信号。GRID1到GRID8是位输出,而SEG9至SEG12是额外的段输出,这些引脚都采用了N管开漏输出,确保了驱动LED的高效工作。
TM1639是一款性价比高的LED驱动控制芯片,其丰富的功能和良好的兼容性使其成为构建小型家电和电子设备中数字显示模块的理想选择。对于电子工程师和DIY爱好者来说,理解并熟练运用这款芯片,能极大提升产品的设计效率和性能。
LED 驱动控制专用电路 TM1639
©Titan Micro Electronics www.titanmec.com
V1.3 - 4 -
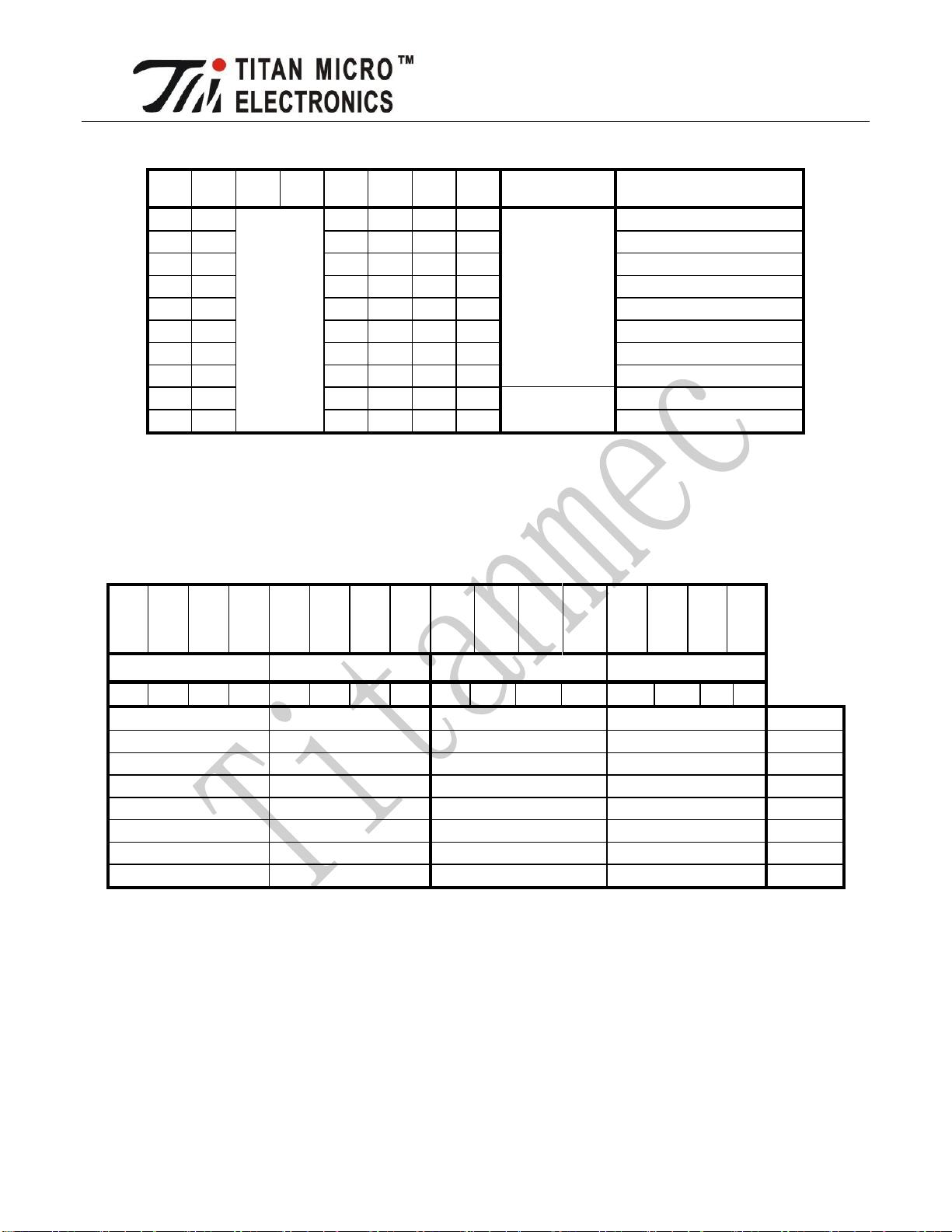
5.3 显示控制
MSB LSB
B7
B6
B5
B4
B3
B2
B1
B0
功能
说明
1
0
无关项,
填 0
0
0
0
消光数量设置
设置脉冲宽度为 1/16
1
0
0
0
1
设置脉冲宽度为 2/16
1
0
0
1
0
设置脉冲宽度为 4/16
1
0
0
1
1
设置脉冲宽度为 10/16
1
0
1
0
0
设置脉冲宽度为 11/16
1
0
1
0
1
设置脉冲宽度为 12/16
1
0
1
1
0
设置脉冲宽度为 13/16
1
0
1
1
1
设置脉冲宽度为 14/16
1
0
0
显示开关设置
显示关
1
0
1
显示开
六、显示寄存器地址:
该寄存器存储通过串行接口从外部器件传送到TM1639的数据,地址从00H-0FH共16字节单元,分别与芯片SEG
和GRID管脚所接的LED灯对应,分配如下图:
写LED显示数据的时候,按照从显示地址从低位到高位,从数据字节的低位到高位操作。
SEG1
SEG2
SEG3
SEG4
X
X
X
X
SEG9
SEG10
SEG11
SEG12
X
X
X
X
xxHL(低四位)
xxHU(高四位)
xxHL(低四位)
xxHU(高四位)
B0
B1
B2
B3
B4
B5
B6
B7
B0
B1
B2
B3
B4
B5
B6
B7
00HL
00HU
01HL
01HU
GRID1
02HL
02HU
03HL
03HU
GRID2
04HL
04HU
05HL
05HU
GRID3
06HL
06HU
07HL
07HU
GRID4
08HL
08HU
09HL
09HU
GRID5
0AHL
0AHU
0BHL
0BHU
GRID6
0CHL
0CHU
0DHL
0DHU
GRID7
0EHL
0EHU
0FHL
0FHU
GRID8
图(2)
▲注意:芯片显示寄存器在上电瞬间其内部保存的值可能是随机不确定的,此时客户直接发送开屏命令,
将有可能出现显示乱码。所以我司建议客户对显示寄存器进行一次上电清零操作,即上电后向16位显存地址
(00H-0FH)中全部写入数据0x00。
剩余17页未读,继续阅读
2019-08-30 上传
2023-05-27 上传
2023-06-01 上传
2023-05-23 上传
2023-06-06 上传
2023-06-06 上传
2023-05-30 上传
2023-05-27 上传

skywu520
- 粉丝: 26
- 资源: 7
 我的内容管理
展开
我的内容管理
展开







最新资源
- 磁性吸附笔筒设计创新,行业文档精选
- Java Swing实现的俄罗斯方块游戏代码分享
- 骨折生长的二维与三维模型比较分析
- 水彩花卉与羽毛无缝背景矢量素材
- 设计一种高效的袋料分离装置
- 探索4.20图包.zip的奥秘
- RabbitMQ 3.7.x延时消息交换插件安装与操作指南
- 解决NLTK下载停用词失败的问题
- 多系统平台的并行处理技术研究
- Jekyll项目实战:网页设计作业的入门练习
- discord.js v13按钮分页包实现教程与应用
- SpringBoot与Uniapp结合开发短视频APP实战教程
- Tensorflow学习笔记深度解析:人工智能实践指南
- 无服务器部署管理器:防止错误部署AWS帐户
- 医疗图标矢量素材合集:扁平风格16图标(PNG/EPS/PSD)
- 人工智能基础课程汇报PPT模板下载
