基于FPGA的模糊自整定PID控制器设计与实现
PDF格式 | 613KB |
更新于2024-08-27
| 153 浏览量 | 举报
本文主要探讨了一种创新的基于FPGA的模糊自整定PID控制器的设计方法。这项研究旨在实现在单片或小型系统中实现智能控制策略的高效和资源优化方案。首先,研究人员利用Matlab系统的仿真工具对模糊PID控制器的参数进行了优化,通过模糊推理规则和算法结构的建立,确定了控制器的最佳工作状态。这一过程涉及到了模糊控制参数的离线计算和在线查找表的创建,确保了控制器能够实时响应并自适应环境变化。
在控制器的具体实现上,采用VHDL语言进行分层设计,这不仅提高了代码的可读性和可维护性,还允许将复杂逻辑分解到FPGA的不同层次,从而降低硬件资源的消耗。FPGA的选择使得设计具备高速处理能力,而增量式PID算法的应用则进一步提升了控制精度和响应速度,改善了传统PID控制器的性能。
模糊自整定技术的关键在于模糊规则和PID参数的动态调整。控制器可以根据当前的偏差(error)和偏差变化率(derivative),在线调整比例系数(KP)、积分系数(KI)和微分系数(KD),这种自我校准能力使得控制器能够在不断变化的环境中保持最佳控制效果。
1引言部分强调了硬件实现智能控制策略的重要性,特别指出FPGA技术与VHDL的结合为这种实现提供了可能。作者引用了Torralba和Cirstea等人的工作,展示了模糊逻辑控制器在FPGA上的成功应用,特别是在汽车工业中的变速器控制。
这篇研究论文提出了一种高效且资源节约的模糊自整定PID控制器设计,通过FPGA技术实现了模糊逻辑控制与PID控制的集成,并通过离线计算和在线自适应调整,提高了控制系统的灵活性和性能。这种设计对于提升自动化设备的控制效率和精确度具有重要意义,为未来的小型化和智能化控制系统的发展开辟了新的路径。
基于基于FPGA 的模糊的模糊PID控制器的研究控制器的研究
摘要:提出了一种基于VHDL描述、FPGA 实现的模糊自整定PID控制器设计方法。首先,借助Matlab系统仿真工
具,优化得出模糊PID参数的模糊推理规则和控制器算法结构。然后,进行控制器的VHDL分层设计。,在一个具体
的FPGA 芯片上实现了该控制器。由于采用了离线计算、在线查表的模糊自整定参数技术和增量式 PID算法,本
设计既降低了FPGA的资源耗费,又改善了传统 PID控制器的控制性能。是实现单片或小系统智能控制策略的一
种新的有效途径。 1 引言 智能控制策略较为理想的实现方式是基于硬件。FPGA 技术的快速发展与
VHDL(Very high speed integrated
摘要:提出了一种基于VHDL描述、FPGA 实现的模糊自整定PID控制器设计方法。首先,借助Matlab系统仿真工具,优化得
出模糊PID参数的模糊推理规则和控制器算法结构。然后,进行控制器的VHDL分层设计。,在一个具体的FPGA 芯片上实现了该
控制器。由于采用了离线计算、在线查表的模糊自整定参数技术和增量式 PID算法,本设计既降低了FPGA的资源耗费,又改善
了传统 PID控制器的控制性能。是实现单片或小系统智能控制策略的一种新的有效途径。
1 引言
智能控制策略较为理想的实现方式是基于硬件。FPGA 技术的快速发展与VHDL(Very high speed integrated circuit
Hardware Description Language)硬件描述语言的支持, 使得智能控制策略(模糊逻辑、神经网络、遗传算法等)的VHDL描述
和FPGA固核实现研究也随 之活跃。在模糊逻辑控制方面,Torralba等人完成了4输入、12个隶属度、64条规则的 模糊逻辑控
制器的FPGA实现,Cirstea等人基于FPGA设计模糊控制器。成功的用于变 速器的控制。
文中阐述的重点:一是通过Matlab的Fuzzy工具箱完成模糊逻辑策略的建立,计算出在 不同的输入条件下的模糊控制参
数,制成模糊查找表;二是基于VHDL描述并在FPGA上实现模 糊自整定PID控制算法。
2 控制器原理
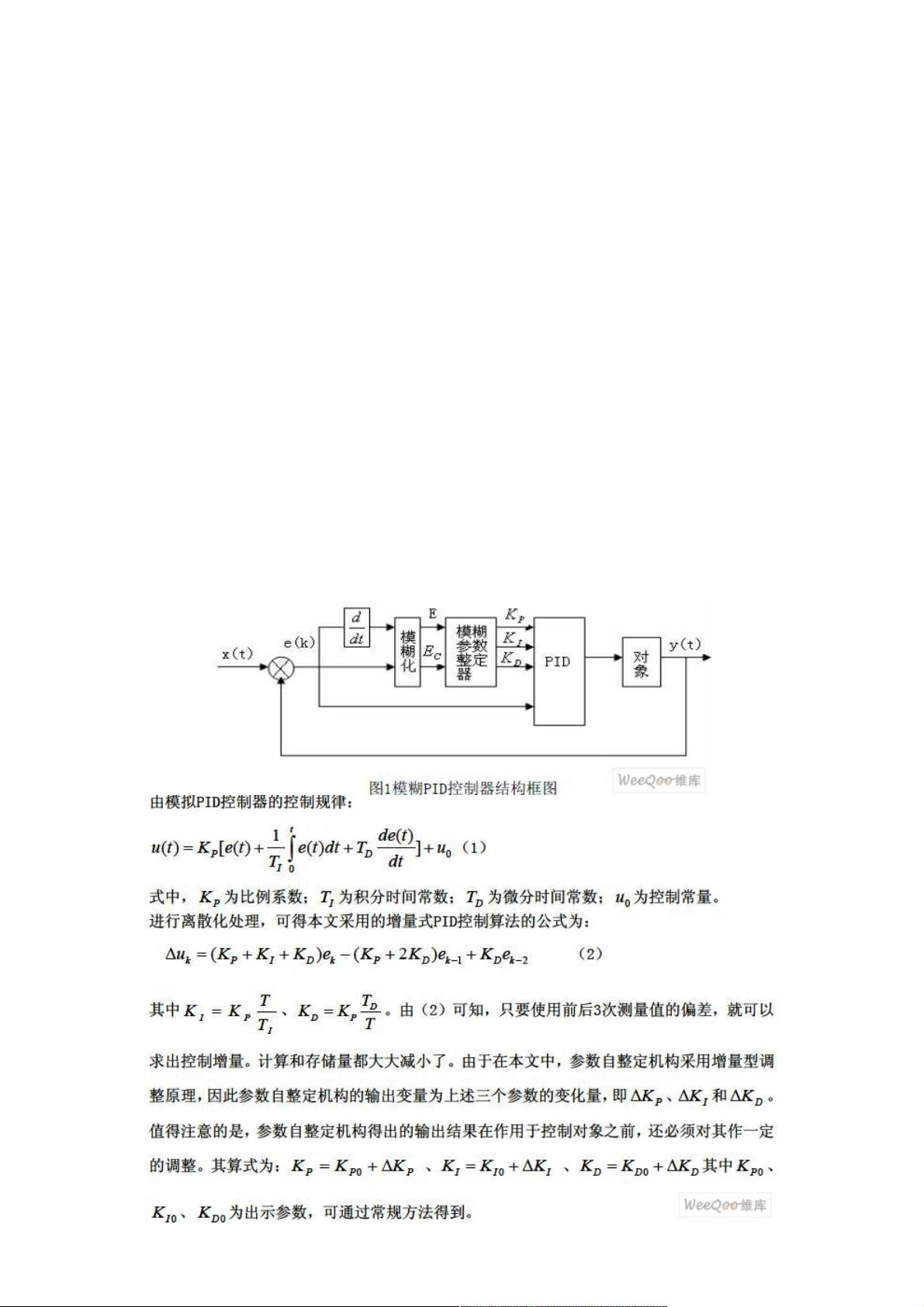
模糊自整定PID控制器结构:是模糊控制器与传统PID控制器的结合,利用模糊推理判断 的思想,根据不同的偏差、偏差变化
率对PID的参数KP、KI 、KD 进行在线自整定,传统PID 控制器在获得新的KP、KI、KD后,对控制对象输出控制量。由此模糊
PID控制器的结构 框图如图1所示。
下载后可阅读完整内容,剩余3页未读,立即下载
相关推荐




weixin_38694800
- 粉丝: 4
 我的内容管理
展开
我的内容管理
展开








最新资源
- Mac用户专属:获取Sublime Text高颜值图标
- 已编译Freetype库2.6.5版本发布
- DALI标准征求意见稿:数字可寻址照明接口通用要求
- Java实现无BUG的Excel导入导出工具类方法
- Everything 1.4.1.7:高效文件查找工具
- 解决Oracle11g SQL Developer无法建立数据库连接问题
- 掌握ReportViewer控件:深入理解Microsoft.ReportViewer.WebForms 10.0.0.0
- MAC咖啡因应用:防止系统自动休眠的解决方案
- 在MFC中实现橡皮筋框选图片功能
- 数值分析课程讲义:深入解析与应用
- Android图片查看功能实现与操作指南
- 网络工程基础作品:初学者入门指南
- APP启动引导界面设计Demo及其效果分析
- Android刮刮卡实现教程与源码解析
- commons-logging-1.1.3压缩包详细解析
- 掌握Mac快捷键的最强工具:CheatSheet 1.2.7中文版
